从工业物料搬运机器人到自动驾驶汽车,机器人类型多种多样。但是,无论是哪种类型的机器人,都可以通过转换数据字节和电信号来影响它们的工作环境。
对一个新的机器人进行有效配置的第一步通常包括正运动学计算。但是在开始介绍机器人正运动学计算的五个有趣小技巧之前,我们需要首先对“运动学”一词进行明确的定义。
运动学是经典力学的一个分支,它是对点、刚体以及对象群组运动的研究,不考虑引发运动的驱动力以及每个研究对象的质量。运动学计算是机器人技术的核心。

有时候,计算过程可能非常复杂,但是这对于机械臂的操作至关重要。每个关节都必须测量出相应角度,以实现在特定轴上的连续旋转。当实现这一步时,末端执行器可以到达空间中的任何点。
需要注意的一点是,对于每组角度,在某一时刻只会有一个计算结果,因此这需要进行确定性计算。此外,必须对于所提供的输入有充分的理解,以更好地解释机械臂的运动方式。
1. 用纸和笔记录所有内容
在刚开始使用机器人时,你会想直接通过计算机开始工作。但其实用纸和笔对所有内容进行记录会非常有益。
虽然机器人看起来像您的标准6R机械手,但其实用铅笔手绘正运动图要容易得多,而且速度也更快。进行这种简单的体力活动将有助于消除潜在的错误假设,并使您更专注于机器人的实际物理配置。

参考: Formal Kinematic Analysis of a General 6R Manipulator Using the Screw Theory – Scientific Figure on ResearchGate.
这种方法也可能会帮助您避免在之后的阶段(当您进入项目的编程阶段时)发生严重的错误。此外,无论您使用哪种绘图风格,请务必清楚地指出每个关节的运动方式和方向。
2. 在每个活动关节上画出轴
在绘制示意图时,请务必画出每个活动关节的轴。实际上,您可以为每个关节指定不同的轴,但要确保每个轴的正确性,这很重要。
如果弄错了这些,将很难使机器人正常工作。通常,最好让x轴位于当前z轴和上一个z轴之间的最短正交线上。z轴本身应位于移动关节的旋转轴上,延伸轴上,或者转动关节上。
3. 考虑末端执行器的操作方式
在进行机器人的正运动学计算时,需要从每个关节的位置计算出末端执行器的姿态。通常,它们不会单由末端关节计算得到,所以考虑末端执行器的操作方式至关重要。
例如,有多个手指,且能够进行自适应抓取的现代化机器人要复杂得多,具有不同的抓取方式。因此,每种模式与所需末端执行器的对应方式将有所不同。
这使其成为建立正运动学模型时的关键考虑因素。
4. 谨慎计算相关参数
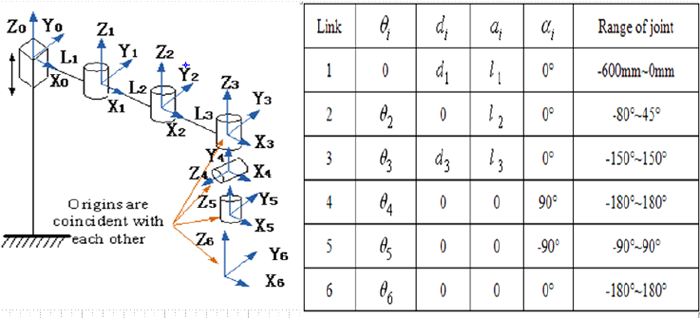
当将机器人模型输入模拟器时,您需要选择参数进行测试。正运动学计算中最常用的方法是Denavit-Hartenberg参数法或DH参数法。
参考: Tele-Robotic Assisted Dental Implant Surgery with Virtual Force Feedback – Scientific Figure on ResearchGate.
然而,这个方法远非完美,常常无法很好地处理平行的z轴。另一个选择是应用螺旋理论的方法或从当今可用的几种几何建模方案中选择一个。
但是,无论选择哪种方法,都必须首先确保运动学库接收参数,所以刚开始选择DH参数是一个合理的方案。
因为DH参数法是最常用的一种方法,所以您会找到 多种指南,可以帮助您有效地将机器人的每个关节分解成各个参数。其中每个参数的获取都会参考前一关节,并参照公法线进行计算(如果当前z轴和前一个z轴相交,则公法线长度为零)。
此时,写下每个关节相关的每个参数很重要。这意味着为每个关节分配了一个值,该值将会成为表示被驱动关节的变量。
5. 利用运动学软件库
有许多运动学软件库可用,并且其中大部分软件的功能远不止执行基本计算。这些软件所提供的一些出色的功能包括:
- • 运动规划
- • 可视化
- • 逆运动学求解器
这些库可以帮助用户快速将参数转换为矩阵,然后可以对矩阵进行处理,以计算关节位置与末端执行器姿态之间的关系。如果您的编程水平较高,也可以轻松地构建您自己的正运动学库。
值得考虑的优秀开发库包括:
- Matlab Robotics Toolbox (Peter Corke 创建)
- OpenRave
- ROS MoveIt
机器人的正运动学计算是设置一台新机械臂的重要步骤,但是要实现真正的控制,还需要一些逆运动学分析。最好从正运动学计算开始,在熟练之后再着手逆运动学分析。
来源:
https://www.youtube.com/watch?v=rA9tm0gTln8
https://www.youtube.com/watch?v=KstFDEUWUm4
DevicePlus 编辑团队
设备升级版适用于所有热爱电子和机电一体化的人。