这篇文章来源于DevicePlus.com英语网站的翻译稿。
©Saiko 等, 2012
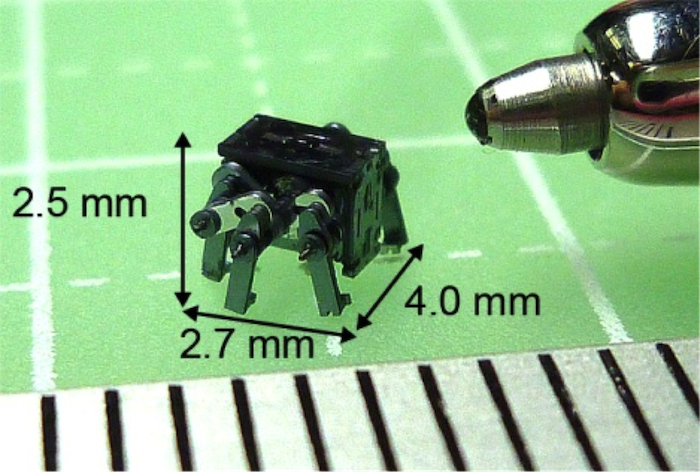
一种昆虫式微型机器人已经问世。这款受昆虫启发的微型机器人重量不到0.080g,尺寸小于5.0mm,有六条腿,可以模仿蚂蚁的爬行动作。Saito博士和他在日本大学的同事一直在积极寻求方法来集成人工神经网络,以产生平稳的、与昆虫类似的运动(转换)行为。
在深入研究细节之前,我们首先来解释一下仿生技术是什么。
什么是仿生?
“仿生一词,是由Otto H Schmitt(Schmitt 1969)提出的,意思是对自然界的方法、机制和过程的学习和模仿。大自然的能力在许多方面都远胜于人类,对其中的许多特征和特性进行改编可以为我们的科技带来巨大提升。” – Bar-Cohen, 2006。
仿生领域为未来的科技发展提供了巨大的潜力。在这项研究中,就是从昆虫的生物物理机制中汲取了灵感,从而在微观尺度上开发了一种微型机器人:一只特别的蚂蚁。研究人员使用模拟集成电路(IC)构造了人工神经网络,可以产生“驱动波形”或脉冲来驱动微型机器人的运动。
为了使所有机器人能够真正实现行走、爬行、摆动甚至跳跃,致动器是必不可少的。致动器是使机器人能够执行动作的实际机制,类似于生物体中肌肉的功能。这种类似蚂蚁的微型机器人使用的是带有嵌入式形状记忆合金的旋转致动器。致动器和人工神经网络都是由硅晶片经微机电系统(MEMS)微加工技术制造而成。
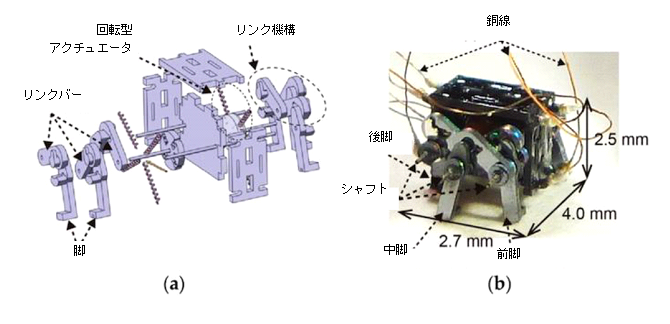
图1:MEMS微型机器人的微机械系统;(a)分解图;(b)微型机器人组装图/© Saito等,2016
如图1所示,连杆机构由3个支脚、轴和连杆销组成。由于中部支脚固定在转子上,中部支脚和转子的旋转相位相同。前端支脚和后部支脚通过连杆销与中部支脚固定,这样可以进行90°相位移。微型机器人的尺寸为4.0 x 2.7 x 2.5mm,并与八根信号线与两个GND线连接(图1b)。当信号线连接人工神经网络时,这个微型机器人就可以实现爬行了。
这种MEMS机器人的特殊之处在于它实现了由硬件模型而非软件模型来构建大型人工神经网络。据研究人员称,鉴于计算机性能(例如处理速度和存储容量)的限制,大规模的数学(软件)神经元建模非常困难。另一方面,硬件神经元建模实现了高速条件下的神经网络连续处理和非线性操作。硬件模型与IC技术的联合使用有助于减小电路的尺寸。因此,对于微米级和毫米级的项目,这非常有用。正是出于这种原因,他们最终选择了硬件神经元模型。
为什么神经网络如此重要?为什么研究人员要如此努力地把这个系统集成到微型机器人中?神经网络很重要,因为它是控制系统拥有“适应性能”的根本。换句话说,神经网络使机器人能够在给定情况下对某些事件作出响应和反应,因此它的动作并不是无意识产生的。在某些时候,机器人会进行学习行为,之后可以根据收集到的信息作出决策。
这种微型机器人通过充分利用脉冲型硬件神经元模型可以实现像蚂蚁一样爬行。脉冲型硬件神经元模型是II类神经元模型,具有一些与实际生物神经元相同的特征,例如阈值、不应期和时空总和。另外,该模型可以产生连续的动作电位。
硬件神经元模型输出“驱动脉冲”,这些脉冲操作机器人的人工肌肉线。有趣的是,机器人控制是通过连续的脉冲波实现的,类似于传递给生物神经元的脉冲,而无需任何软件程序或A/D转换器。
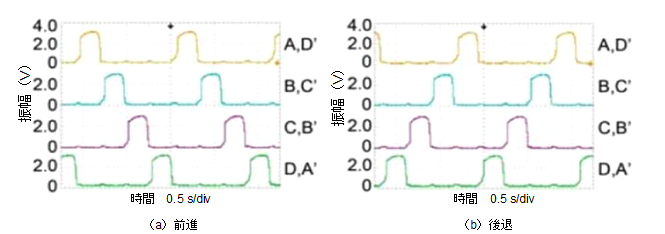
图2:硬件神经元模型的输出波形示例/© Saito 等, 2012
如图2所示,硬件神经元模型可以输出向前运动和向后运动的波形。波形的输出信号连接到由铜线制成的人工肌肉线上。
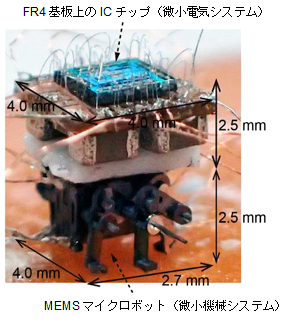
图3:组装好的MEMS微型机器人/© Saito等, 2016
在微机械系统(底部)的上方是人工神经网络微电子系统(顶部)的裸芯片IC,重量为0.02g。裸芯片IC固定在阻燃剂4(FR-4)上。MEMS微型机器人的运动速度为4毫米/分钟。如果顶部没有带有FR-4上的裸芯片IC,速度可以达到26.4毫米/分钟。这里需要注意的一件事是电流镜像电路。形状记忆合金致动器需要电流来产生旋转运动。因此,电压波形必须转换为电流波形。
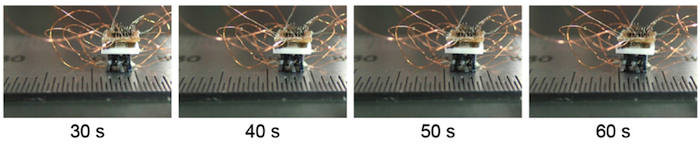
图4:MEMS微型机器人的移动/© Saito等, 2016
从视频中可以看出,这种仿昆虫MEMS微型机器人的运动行为类似于蚂蚁。不要为它的速度之慢感到太惊讶!研究人员解释说,形状记忆合金的热量传导至MEMS微型机器人的机械零件,导致了机器人速度很慢。在他们后续发布的作品中介绍了一种新型的旋转致动器,可以产生速度更快的连续旋转运动。
如果您有任何意见或疑问,请在Google +上给我们留言,以及关注我们的动态。在下一篇文章中我们将探讨具有两种致动器的微型化六足MEMS机器人:形状记忆合金(SMA)致动器和压电(PZT)致动器。
Yulhane-Jerez Koh
Yulhane毕业于加州大学伯克利分校,是一名生物力学工程师,也是DevicePlus的执行编辑。Yulhane对集群机器人技术、机器学习以及神经科学领域具有浓厚的兴趣。