©ECAL
1.Deltu,有个性的“镜像界面”机器人
Vimeo网站上展示的来自ECAL大学的Deltu ECAL/Alexia Léchot。
拥有人工智能的机器人并不新鲜。然而,与我们所熟悉的可爱的似人型机器人不同,这位名叫Deltu的Delta机器人具有三条腿,但是没有脸。Deltu的外表并不那么惹人喜爱,而且当游戏对手水平太菜,Deltu甚至会闹情绪。
法国洛桑艺术设计大学(ECAL)的互动设计学生Alexia Léchot构建了Deltu,作为其学士学位毕业设计项目的一部分。该机器人是一种3D机器,通常用于制造工厂,负责包装、移动其产品。添加了AI之后,Deltu和人类可以通过Lechot创建的应用程序进行游戏。Deltu可以通过两台相对放置的iPad,实现三种基于模仿的游戏。第一种游戏就是人们在iPad上画一些东西,Deltu则试图解释图像并将其画在自己的ipad上。第二种游戏是两名参赛者之间进行比赛。第三种游戏是一种记忆游戏,人类必须学习机器人点出的画面。如果人类表现不佳,机器人就不跟你玩了。然后,它会上网、拍几张自拍照并将其发布在社交媒体上,比如Instagram。
Alexia在接受Arduino的采访时解释说,工程行业的探索和学习为她设计这款机器人带来了灵感。机器人并不一定就得具有人形,因为没有人规定必须如此,对不对?机器人在社会中的地位还没有定论,Alexia有很多空间来拓展她的想象力。
原型机
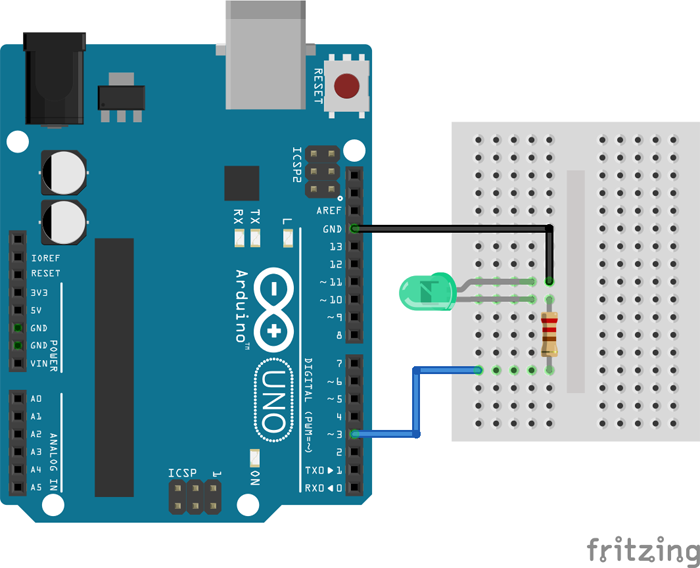
Deltu主要由木头和铜腿制成,系统还包含Arduino Uno、三个带金属齿轮的伺服电机、Arduino Proto Shield和USB 2.0电缆。其软件通过两个Unity应用程序运行。iPad上的人类应用向计算机发送HTTP请求。然后一个Python服务器通过串口将字符串发送至Arduino Uno。
2. Forpheus,乒乓球机器人

©AutoPartsAsia
欧姆龙公司是一家专注于自动化领域的传感技术和控制技术公司。据说其技术能“提升人类能力”。欧姆龙研制的名为Forpheus的机器人还被吉尼斯世界纪录认定为“首台机器人乒乓球教练”——该机器人的控制极其精确,其分辨率为1/1000秒。
欧姆龙公司表示,该机器人基于经验诠释了其对人与机器关系演变的愿景。该公司开发技术,力求能够帮助创造更丰富的社会,创造人与机器最佳的“和谐”未来。在这种情况下,机器将会丰富我们的经验,并协助人们做出更富创意的生活决策。
原型机
开发人员克服诸多挫折,专注于传感器的精度,使得击回的球总能够让对手轻松打到。系统采用两台摄像机跟踪球的位置和速度。然后,根据球的轨迹曲率和减速度来估计转速。机器人会进行瞬时分析,甚至会考虑马格努斯效应(Magnus Effect)。机器人还能够识别对手的站立位置和球拍位置,分析球的3D位置并预测其轨迹。该机器人配备了欧姆龙的专有预测模型,拥有精确的旋转速度和实时响应,能够准确计算球的轨迹——因为它每秒可进行80个不同的计算。
该机器人还通过提高人类玩家的成就感来帮助人类运动员。它能够记住球的轨迹,并考虑到人和机器人本身最容易的击球位置。根据人类对手在游戏中的水平,机器人还可以加快速度或者进行更轻的击球。
欧姆龙认为,Forpheus使用的这种技术可以为工作场所的人类活动提供支持。通过检测和预测货物的位置和运动,以及自身运动的控制和实时信息传递,这种系统能够改善工厂生产过程的工作环境。
3. Mouser Electronics——美国队长之盾和钢铁侠手套
Mouser Electronics公司发布了Empowering Innovation Together(共同创新)系列的一个新项目,由前演员和工程师Grant Imahara主持。他们打造了一个创新实验室,旨在使用不同技术并制作新产品。这次,他们证明有些科幻特效可以成为技术现实。梦想成真了吗?Imahara决定打造钢铁侠手套的现实版本,而他的对手Allen Pan再现了美国队长之盾。
Mouser公司的高级市场副总裁Kevin Hess表示:“我们与Marvel在他们的新项目系列上展开合作,这是让未来工程师参与并对科学、技术、工程和数学(或STEM)教育感兴趣的出色方法。”他认为有必要继续塑造下一代创新人员。
原型机
钢铁侠手套:
首先,Imahara使用3D打印机打印钢铁侠手套的部件,然后装上合法购买的高功率激光器。为了能够弹出,Imahara设计了一个使用微型伺服的定制机构。他使用ADI公司的ADP5054 DC/DC小尺寸电源转换器。为了连接所有模块,他还使用了Molex的UltraFit电源连接器,因为它体积小,但是电流承载能力很强。
美国队长之盾:
Pan将盾牌极具创意地构建在了无人机顶部,以便盾牌飞行并返回用户。盾牌还需要一个具有加速度计的特殊手套,以便让发射器将手臂运动映射到附着在盾牌上的无人机。这样,Pan就可以在没有遥控器的情况下射出盾牌。
Pan的最大挑战就是如何让盾牌飞起来。由于盾牌必须放置在无人机顶部,因此其重量预计不能超过100克。最终的结果是约96克。即使所用油漆的重量也必须计算出来。Pan还使用了Molex的Temp-Flex电缆和一个ADI 的加速度计。
两者的比赛如下:用各自的武器将一个气球弹出三次。Imahara和Pan认为他们打成了平局。虽然这与真正的英雄电影不完全相同,但这是一个非常成功的项目,为进一步提升打下了良好基础。
4. 637毫秒内复原魔方的机器人
©Infineon
自1974年匈牙利人Erno Rubik发明魔方以来,该玩具获得了人类一贯的关注和赞誉。14岁的Lucas Etter在4.9秒钟内复原了这个立方体,让世界感到惊讶。然后,今年1月份,一名荷兰人Mat Valks创下了4.74秒的纪录,并被吉尼斯世界纪录收录。人类一直争取在最短的时间内复原该立方体,然而,有些人已经展开了机器人复原魔方的竞争。仅在Valks创下吉尼斯记录几天之后,德国科学家Albert Beer就构建了机器人Sub1,只需0.8876秒即可复原魔方。
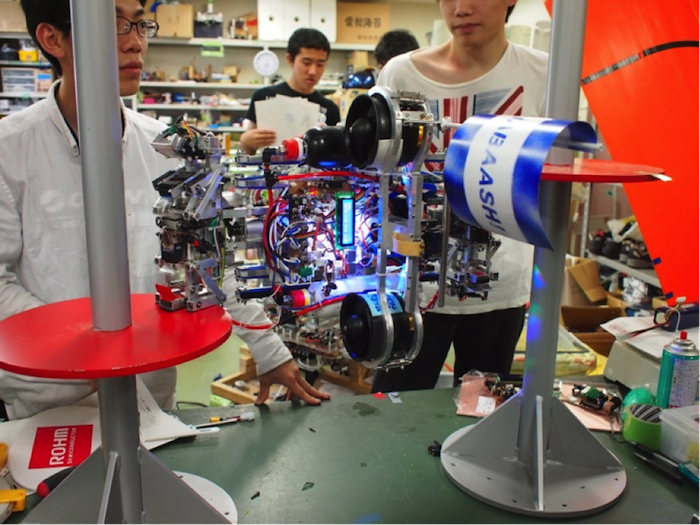
Sub1包含两个拍摄魔方六个面布置的网络摄像头、一个兼容Arduino的微控制器以及六个旋转魔方块的步进电机。按下启动按钮后,两个网络摄像头的快门会拍摄两张照片,每张图片显示魔方的三个面。然后机器人识别魔方块的颜色,并利用Herbert Kociemba两相算法形成一个解决方案。系统能在步进电机的20次移动之内复原魔方。
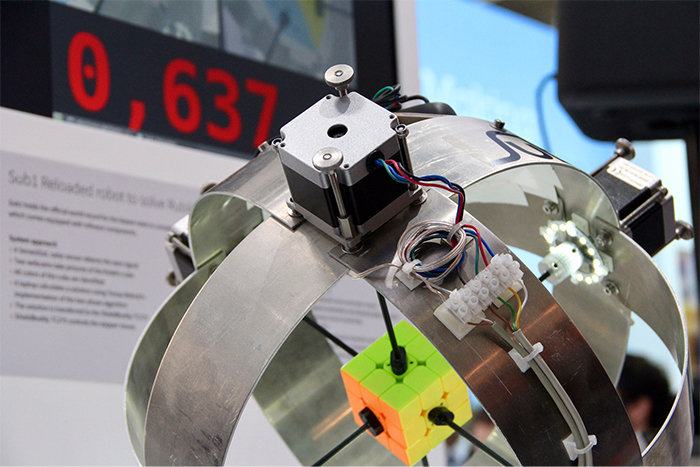
现在,Beer又创造了机器人Sub1 Reloaded,在最近Electronica电子展上再次打魔方复原记录。这一次,机器人只用了0.637秒。
原型机
构建能够解决复杂魔方的机器人并不容易。这需要强大的计算能力。Sub1 Reloaded搭载了AURIX™系列的ShieldBuddy TC275微控制器。Sub1 Reloaded还包括用于运动检测的Sense2GoL雷达演示套件(BGT24LTR11)、IRLB8721PBF场效应管以及六台Trinamic QSH5718步进电机。
Sub1 Reloaded能够通过各种微芯片模仿人体动作以及其他功能。该机器拍魔方照片,从而找出最快最好的解决方案,并将命令发送到其他动作部位。魔方各个侧面的六台电机在不到一秒的时间内即可解决这个问题。
虽然每个魔方都可以通过20次动作复原,但是为了获得最好的复原时间,Albert Beer还是为Sub1 Reloaded多加了几次动作。
Yulhane-Jerez Koh
Yulhane毕业于加州大学伯克利分校(UC Berkeley),是一名生物力学工程师,同时也是美国deviceplus公司的执行编辑。Yulhane的主要兴趣在于群体机器人、机器学习和神经科学领域。