©哈佛大学威斯研究所
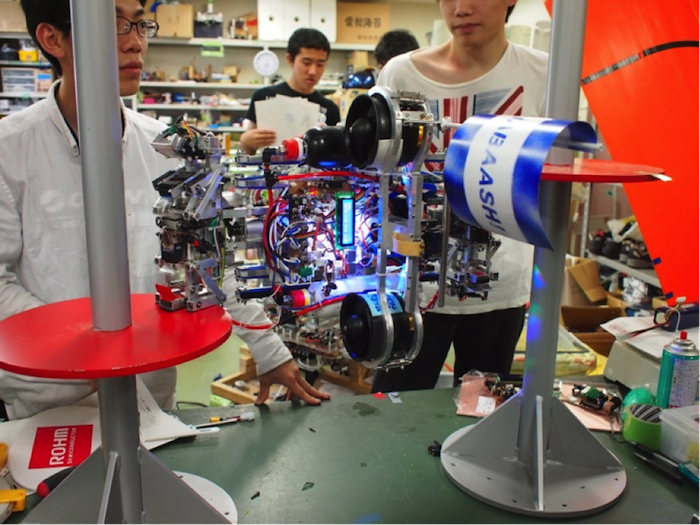
受传统日本折纸艺术的启发,折叠机器人已成为机器人设计中令人兴奋的新前沿领域。由于折叠式组装的简单性和低成本优势,具有折纸式折叠工艺的打印机器人和其他复杂装置已成为一种很有前景的制造方式。美中不足的是,这种制造方式具有一个主要缺点:折叠操作时必须依赖外部电线和电池提供动力。已经证实了小型折叠机器人和设备的功能存在一些问题。
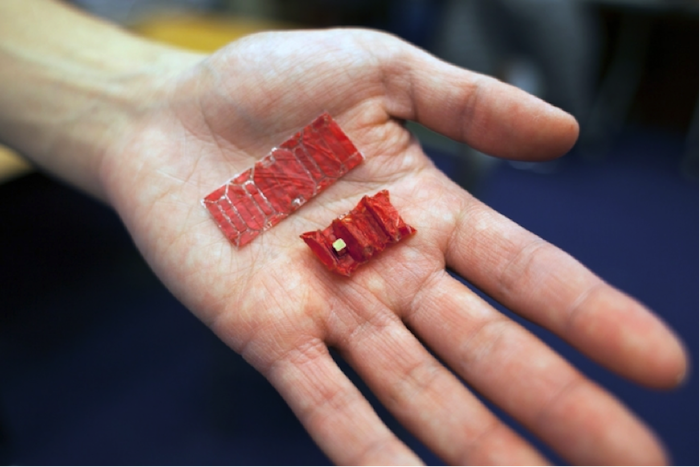
哈佛大学的研究人员最近找到了克服该问题的方法。他们研制了无电池折叠机器人,通过无线磁场能够实现动力操控的复杂、可重复的动作。研究小组的机器人采用扁平的薄塑料四面体,三个外三角结构通过铰链连接到配有小型电路的中心三角结构上。为了操控这些设备使之在没有电池的情况下移动,研究人员在其关节中安装了两个结构:包括在加热时将机器人恢复到原形的形状记忆合金(SMA)线圈,以及在磁场强度发生交替变化时能产生电流的微型电路。通过改变频率,可以使机器人按需要折叠其关节,并且所有关节彼此独立。他们甚至能够使用多重电磁频率使机器人能同时折叠多个关节。该团队展示了多个关节自由度,精确到厘米和毫米级。
©哈佛大学威斯研究所
由机器人专家Mustafa Boyvat领导的研究人员能够在没有任何身体接触的情况下操控设备使之移动和展开,而且机器人不在视野范围内。“我们相信这些演示展示了具有无线供电和控制功能的折叠机器人和设备的集成可行性,”该项目研究者指出。“有一种潜在的用途是在人体内遥控操作一种基于折叠技术的医疗设备,无需电池或控制电子设备。”
因此,针对这种极简式机器人技术,研究人员构想的一项关键应用就是可吞咽折叠机器人,可替代侵入式内窥镜。目前采用内窥镜伸入并通过患者的喉咙以帮助医生进行手术,另一种方法是用机器人替代让患者感觉不舒服的内窥镜,患者可以吞下一个可以四处移动并执行简单任务(比如拿着纸巾或拍摄)的微型机器人,同时用身体外面的线圈供电。
研究人员希望继续探索这些具有潜在可行性的微型机器人的规模和能力。“小型化机器人仍有研发空间,” Boyvat说。“我们认为我们尚未达到微型机器人的极限,我们很高兴能够在生物医学应用设计上的研发能够不断发展与进步。”
原创研究资料参见:https://robotics.sciencemag.org/content/2/8/eaan1544.full