这篇文章来源于DevicePlus.com英语网站的翻译稿。
©CSIRO
由于消费级3D打印的爆炸性增长,使许多学生和业余爱好者能够通过设计并打印自己的部件或利用开源项目来探索机器人技术。由此萌生了有史以来最具创新性和独特性的机器人项目。在动物王国中,六足动物是六足节肢动物才算是真正意义的昆虫。在机器人技术领域,六足机器人这一术语即为这种昆虫的象征。由于许多六足机器人的设计师都从各种昆虫及其特定的运动机制中获取大量灵感,因此统一采用这一名称是有意义的。以下是我们遇到的一些最具创意的六足机器人。
Scorpion Hexapod(六足蝎子机器人)

©New Atlas
一个学生团队在比利时的根特大学研制了一台3D打印机器人,这台机器人看起来就像是噩梦或未来派科幻电影中的怪物。这只令人印象深刻的六足动物看起来就像爬行的蝎子。它甚至能够将尾巴向前甩动并“刺痛”那些敢于足够靠近的人,并在其身上喷射墨水,提醒其被装有标识物的毒刺扎过。
在设计制造六足机器人的过程中,机器人的制作者考虑了当前流行的许多机器人自制方法。这点在他们的论文摘要中得到了体现:
“蝎子机器人的设计应尽可能具有可重复性、模块化和适应性,严格按照数字生产技术和现成的零件生产。这些生产技术确保机器人及其所有组件易于再现并具有实用性,使每个人都可以创建自己的六足机器人或在未来的工作中优化机器人。”
学生团队的项目旨在改进2012年研制的Stigmergic蚂蚁机器人,并将其作为根特大学工业设计中心的吉祥物。除了对六足蚂蚁机器人的功能进行了重新设计以外,他们还希望延长电池寿命并使之更加模块化。通过使用轻质热成型聚苯乙烯来降低机器人重量,并增加“待机模式”来省电,从而延长电池使用寿命。机器人的控制中心位于Arduino Nano。采用模块化的3D打印设计方式可使机器人易于修改和复制。
MX-Phoenix

©Zenta
MX-Phoenix是由挪威工程师和机器人爱好者KåreHalvorsen共同设计的六足机器人,昵称为Zenta。正如您将在下面的视频中看到的,这台像狼蛛一样强大的六足机器可以适合各种各样的地形。MX-Phoenix可以在平坦的表面及不均匀的岩石地面行走,还可以上下楼梯。从控制器演示视频中可看出MX-Phoenix的快速响应速度和非常平稳的步态。
多年来,Zenta设计了许多六足机器人和其他品种的机器人,包括他屡获殊荣的MorpHex机器人。他陈述了该特定项目的目标:
“更加动态的步态引擎和地形适应能力。我还想制作一台身体相对较小且腿部较大的六足机器人,我也试图让总重量尽可能低。”
机器人的胫骨和身体组件使用Fusion 360设计并使用WANHAO Duplicator i3打印。他还使用丙酮蒸汽处理从而增加了打印的ABS部件的强度。Mx-Phoenix重量为4.76千克(10.5磅),总共使用了来自Robotis的18个Dynamixel伺服系统。C ++代码中采用了Zenta六足机器人的自定义步态算法(称为DynaZgait),该算法目前被用于Teensy 3.6 MCU。欲了解有关Zenta项目的更多信息,请访问zentasrobots.com。
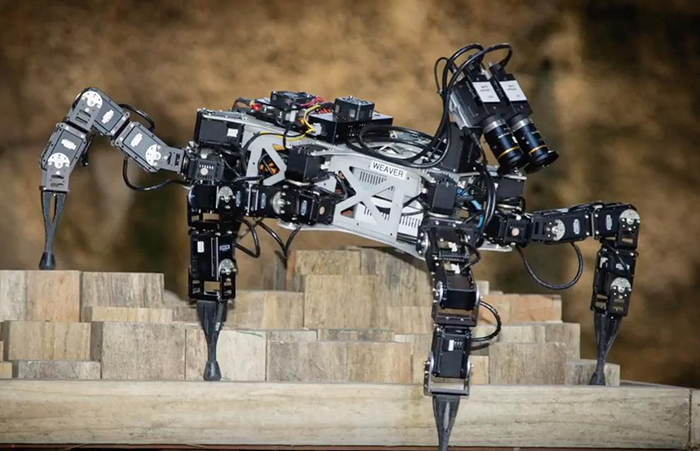
Weaver

©CSIRO
Weaver是一种终极版全地形六足机器人。由联邦科学与工业研究所的机器人和自控系统小组研制 。
在澳大利亚的(CSIRO)机器人的每条腿上设有五个关节,实现了30°自由度。与更简单的设计相比,这种驱动量可使六足机器人具有更高水平的本体感觉。本体感觉是指对身体自身各部位的相对位置和运动中使用的力度的自我感觉。外部感知感应能力使Weaver能够实时实现自我稳定,而无需之前版本中的地形配置功能。
如视频中所示,Weaver能够无缝地适应并走遍不同的地形。Weaver还能够在高达50°的斜坡上保持静态稳定。
Weaver还可以配备立体视觉,用于确定在所遇到的地形采取最合适的步态。以下视频中为您展示了引导步态参数选择的立体视觉演示。
这项技术和研究应用前景广泛,包括环境研究、探索任务、搜索和救援等等。
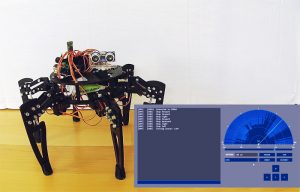
制作自己的六足机器人!
六足机器人是最酷的机器人之一!您是否很想制作自己的六足机器人,但不知道从哪里开始?请查阅我们的3D打印Arduino Hexapod教程:
 |
此处链接转移至DevicePlus.com英语网站解决方案:Arduino Hexapod 第1部分 — 机械结构和接线 本教程将指导您如何创建自己的Arduino hexapod或Ardupod,使用3D打印机打印所有部件并仅使用12个伺服器来控制机器人。 |
 |
此处链接转移至DevicePlus.com英语网站Arduino Hexapod第2部分:编程 在Arduino Hexapod系列的第二部分中探讨了如何通过逆运动学来编写第1部分中的Ardupod。 |
 |
此处链接转移至DevicePlus.com英语网站Arduino Hexapod第3部分:远程控制 您还可以使用HC-05蓝牙无线控制ArduPod。您还可以使用Processing应用程序,这样您就不必每次都使用书面命令来移动ArduPod。 |
DevicePlus 编辑团队
设备升级版适用于所有热爱电子和机电一体化的人。