©Caltech
模仿蝙蝠飞行的蝙蝠仿生无人机
机器人创作和机器人机制的设计灵感通常来自动物行为。来自伊利诺伊大学香槟分校和加利福尼亚理工学院的研究团队模仿蝙蝠翅膀结构,成功构建了一只完全独立自主飞行的机器人——蝙蝠机器人(B2)。
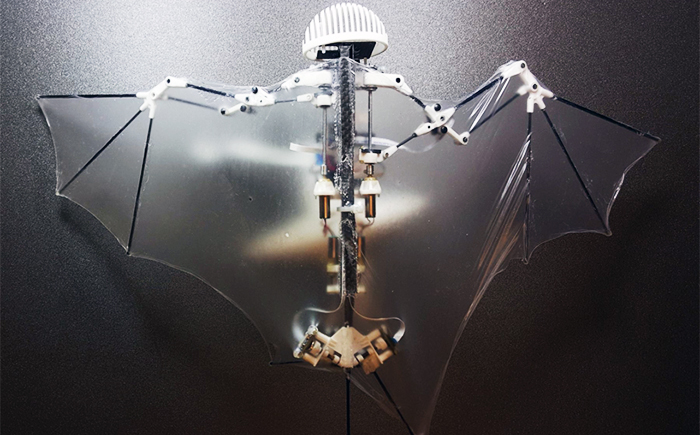
蝙蝠在飞行中表现出卓越的敏捷性,这是因为它们能够使用独立控制的关节来调节翼展、翼弯和攻角。B2仅重93克,其形状像一只真正的蝙蝠,并具有与蝙蝠飞行形态特性最匹配的可拉伸硅基薄膜翅膀。该机器人能够通过弯曲、展开和扭转其肩部、腕部、臀部、肘部和腿部来改变其翼形。
此项研究具有双重意义。研究蝙蝠飞行能够为飞行机器人振翼提供宝贵的见解,同时这种蝙蝠仿生机器人设计可以提供更安全的人类/无人机环境,具有实际应用意义。许多以前的项目主要模仿昆虫飞行。大多数昆虫的翅膀结构都是单一的未联结结构单元,不像蝙蝠那样复杂。与其他飞行动物相比,蝙蝠的飞行机制独一无二。他们的飞行机制涉及多种不同类型的关节(比如球窝关节和旋转关节),这些关节将骨骼和肌肉彼此互锁在一起,形成具有超过40个自由度(DOF)的变质肌肉骨骼系统。研究人员表示,蝙蝠飞行的这些方面为飞行机器人提供了独特视角。
与当前飞行机器人(比如四旋翼飞行器)相比,蝙蝠仿生飞行机器人拥有众多优点。其中最大优点就是其柔软的翅膀。受材料和设备(比如尖锐的转子叶片或螺旋桨)以及高振幅噪声限制,传统的四旋翼飞行器和其他旋翼飞机被认为对人类不安全。另一方面,具有蝙蝠柔韧翅膀的机器人主要由柔性材料组成,并且振翼频率更低(7至10Hz,而四旋翼飞行器为100至300Hz)。这种机器人在穿越不同的环境时,其操作和飞行更加安全,几乎不会造成任何损坏。
蝙蝠飞行运动学中的主要自由度在B2的振翼、前肢中间运动、手指屈曲伸展、腕部(将手连到前肢的小骨头)旋前旋后转以及腿背侧运动的设计中得到了充分体验。
这种“生物学意义上的”自由度使得研究人员能够以更简单的设计来模拟蝙蝠的飞行运动,但是功能相同。
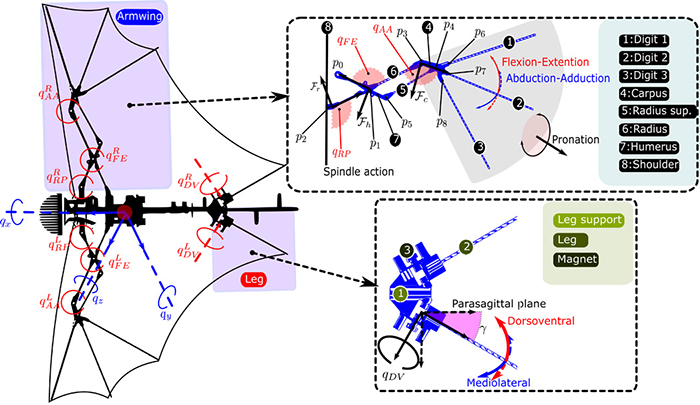
图 1. 蝙蝠机器人的飞行机制及其自由度/©Ramezani等人,2017
蝙蝠机器人的飞行机构由2个翅膀(左翼和右翼)组成,每个翅膀包括一个前肢和一个后肢机构。左翼和右翼通过机械振荡器耦合在一起。凭借曲轴机构,两只翅膀可以同步朝背腹方向移动。每只翅膀还可以执行异步和中间运动。影响翅膀后缘的后肢(腿)可以执行异步的背腹方向运动。前肢由九个环节或关节组成:肱骨(p0-p1)、肱骨支撑(p1-p2)、桡骨(p1-p3)、桡骨支撑(p4-p5)、腕骨(p3-p4)、腕关节支撑(p1-p5)以及三个数字链接(图1,右上)。
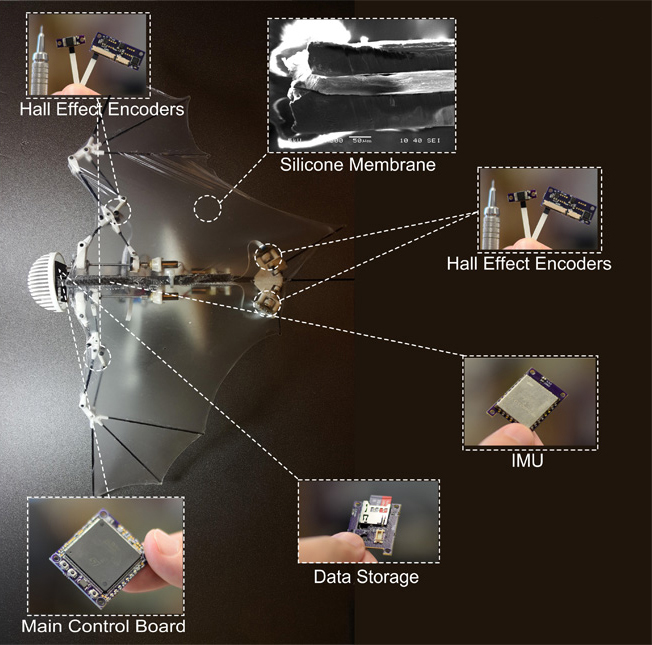
图2. 蝙蝠机器人(B2)的电子部件/©Ramezani等人,2017
B2的独特特征之一就是可以在没有遥控器的情况下飞行。B2的飞行控制系统由其板载传感器、带编码器反馈的高性能微型电机和微处理器组成。传统的固定翼MAV通常通过推动和常规控制面来控制,而B2具有九个主动摆动关节,需要进行适当的控制工作分配。
B2由板载计算机以及执行自主导航的多个传感器组成。这些电子产品专门针对这种自主系统定制,而且都配置在机器人内部,这意味着B2的外部没有电子产品。B2头部的MCB搭载了一个微处理器,并且能够实时处理导航和控制算法。传感器数据通过数据采集单元获取;数据采集单元还负责指挥微致动器。传感单元由小尺寸定制电路板组成,通过记录两种测量值与传感器和MCB相连接。位于胸腔中的惯性测量单元(IMU)(其中x轴指向前方,而y轴指向上方)负责读取机器人相对于惯性框架的高度。位于肘部、臀部和拍打关节的五个霍尔效应编码器负责读取四肢之间相对于身体的相对角度。
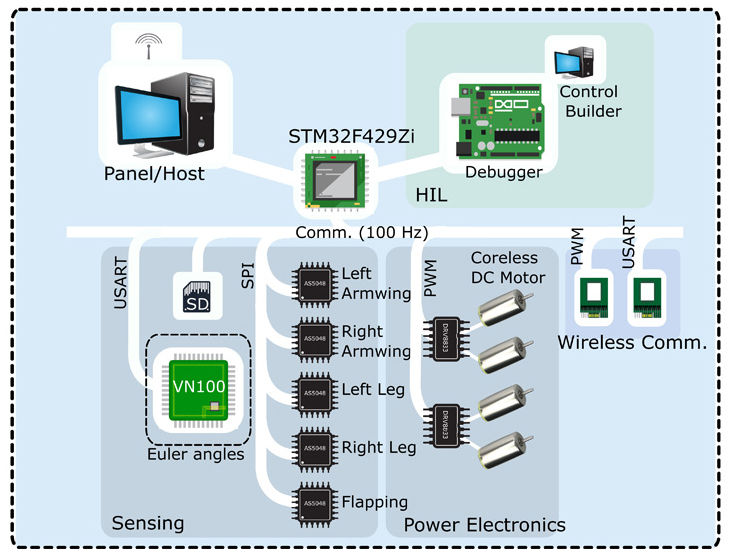
图3. 蝙蝠机器人的数据流程图/©Ramezani等人,2017
B2的数据流程图如图3所示。中心微处理器(STM32F429Zi)负责与许多电子设备通信,其中包括SD卡、IMU(VN-100)、五个霍尔效应编码器(AS5048)和两个双直流电机驱动器。在无线通信方面,系统配备了两个8通道微型RC接收器(DSM2)和一个蓝牙设备,负责与主机或面板进行通信。研究人员使用硬件在环(HIL)仿真试验测试平台上的控制器。在HIL中,飞行控制器嵌在物理微处理器上,研究人员采用实时计算机作为虚拟设备(模型),负责响应虚拟模型的变量状态。
蝙蝠翼皮中的弹性网络通过覆盖在翅膀骨骼上的超薄(56微米)皮肤实现。由于前肢和腿部运动的限制,传统的织物覆盖材料,比如尼龙膜,并不适合B2机身。因此,该团队采用了一种定制硅胶膜,其弹性足以匹敌真实蝙蝠翼膜的弹性。由于逆向工程无法实现所有的特性,因此该团队只将注意力集中在翼膜的几个属性上。他们发现蝙蝠生物皮肤的关键解剖学特性如下:1)单位面积重量(面积密度);2)拉伸模量;和3)拉伸性。
通过一系列机械约束和反馈控制设计,目前设计实现了主的要振翼关节,能够控制蝙蝠机器人以六个自由度飞行。蝙蝠具有复杂的肌肉骨骼系统(即多个主动和被动关节),这使得研究人员很难将所有关节纳入其设计中。然而毫无疑问,B2已经朝着复杂蝙蝠运动迈出了众多第一步中的一步。该模型有助于进一步研究蝙蝠飞行中的翼展运动模式,并重建生物蝙蝠的飞行行为。
Yulhane-Jerez Koh
Yulhane毕业于加州大学伯克利分校(UC Berkeley),是一名生物力学工程师,同时也是美国deviceplus公司的执行编辑。Yulhane的主要兴趣在于群体机器人、机器学习和神经科学领域。