上篇:“魅力四射”的机器人制作
前言
大家好,我是河岛,我的兴趣爱好是机器人制作。
在上篇中,我以全自动回笼觉辅助装置“再睡五分钟”为例,给大家介绍了作品的创意形成过程。在下篇中,我将给各位读者朋友介绍确定作品的创意和方向之后的实际开发过程。
绘制草图
首先,超级简单地画一下草图。我并不怎么擅长画图,所以经常会以“只用文字记下来也行啊~”为理由敷衍过去。但是,如果绘制草图就能发现,“比起这种结构,那种结构说不定更合适……这里的外观稍微改一下也许更好……”,这样就能在较短的时间内完成各种摸索试错。所以建议大家即使不擅长,也要尝试着去画。
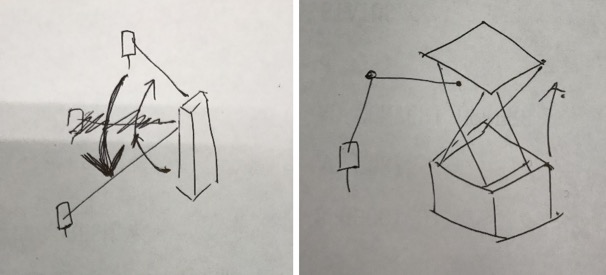
这就是我当时画出来的草图,连我自己都觉得画得不好。左边的草图,其实我本人看了也不清楚想表达什么,而右边的草图就已经可以看出通过伸缩机构展开以及类似于水平多关节这样的结构。
在草图绘制阶段,如果能够发现自己设想的机构是否具有可行性,就可以预防后期制作过程中出现严重的问题。
结合工作环境,考虑作品开发过程
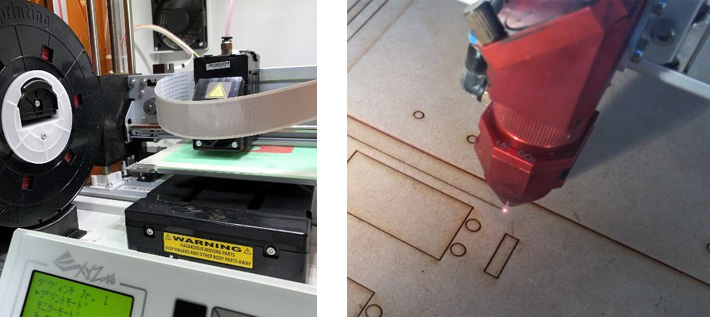
这里所说的工作环境,指的是制作过程中需要用到的所有的东西,包括3D打印机和激光切割机等机械加工设备、工具、电脑和电脑中安装的软件等。如果能够使用学校或者“数制”工坊等机构的机械加工设备,那自然是最为方便。在本项目的制作过程中,我就利用了我平时常去的一家“数制”工坊的激光切割机,3D打印机则用的是我家里的3D打印机。
3D打印机和激光切割机
当然,在实际开发过程中,激光切割机和3D打印机并不是非用不可的。可以使用手动工具进行加工,也可以选择使用剪刀和美工刀即可加工的材料。大家可以根据自己擅长的制作方式,或者想要尝试的制作方式等,按照自己喜好来确定制作方案。
我之前参加机器人竞赛等活动,制作机器人时,主要负责的是电子电路和程序部分的工作,所以在本项目之前,我并没怎么涉足机械的CAD设计和机械加工这两个领域。我自己也想通过此次的作品制作,掌握一些机械的设计和加工相关的技能,所以借此机会,我决定要尝试使用3D-CAD和数控加工设备,挑战机械的加工制作。

因为是首次尝试,所以打印了各种形状的部件,不断摸索试错。
在制作电子电路时,可以在自己设计电路板图案之后,使用覆铜板自己进行切割加工,也可以委托第三方制作。在本项目中,我想在不断摸索试错的同时,优先考虑自己动手制作,所以我定的方案是自己在Arduino上安装Vanilla Shield(跟万能板一样,带焊孔),然后再配所需要的电子部件。
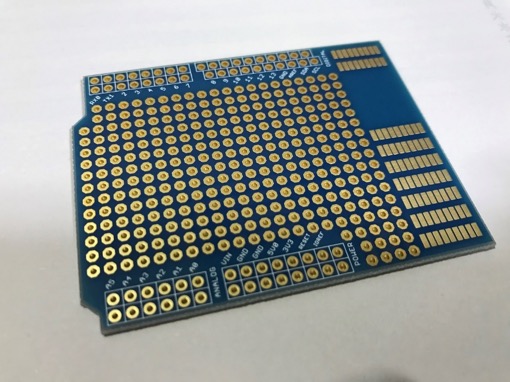
适配Arduino的Vanilla Shield
制定日程
如果是以团队的形式进行开发,则可以考虑分成机械部分和电路部分,两部分的相关人员同步作业。不过这次我决定一个人完成本项目的所有工作,所以难以同时推进两种作业。因此,在制定日程时,我只能将所有的制作任务,按照时间顺序向后排列在一起。
因为制作的开始日期和截止日期都已经确定下来,我必须要在这期间完成作品的制作,所以在日程制定阶段,如果能够提前预估一下“各项作业大概要花多少天能够完成”、“哪项作业可能不会太顺利”,在制作过程中,我们就既能把握大致进度,知道完成了百分之多少,同时心里也大致清楚一天要花几个小时进行作品制作。因此,建议大家采用这种方法制定日程。

这是实际的制作日程。我先安排了一轮试制,然后在后面的正式制作阶段,对试制过程中发现的问题点进行修正改善,进而完成整个作品的制作工作。
但是,说实话,对于那些首次尝试的作业,不知道做起来要花多长时间。对于那些时间无法预估的作业,我们要抱着“尽早动手,全力以赴”的心态去应对。在无法预估时间的情况下,制作日程框架也许能够有所帮助,因为难以预估,所以比起抱头苦恼,尽早动手尝试往往更有效。
机械设计和部件加工
首先介绍机械设计部分。“再睡五分钟”整体设计使用的软件是3D-CAD(Fusion 360)。在使用CAD进行设计时,必须要注意的是我们设计的部件形状最终能不能加工出来。比如,家用的3D打印机并非任何形状都可以打印,由激光切割机制作的部件也会受制于设备的功率(瓦数),能够切割的材料和厚度是有限的。关于这方面的技术信息,可以去咨询一下有相同设备使用经验的朋友,也许会有很多新的发现。
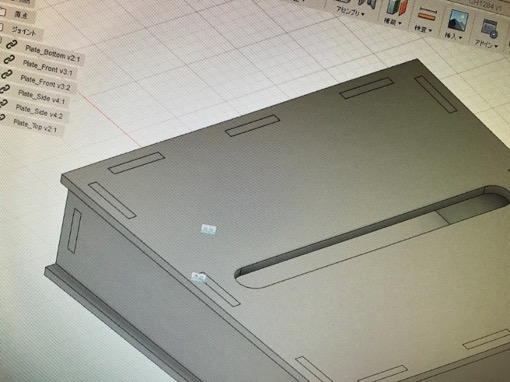
这是我最初搭建的主体部分的模型。我一开始是打算用长孔发挥类似于滑轨的功能,机械臂在长孔内滑动展开。然而,在设计过程中,我察觉到“摩擦的问题可能很难解决”这一风险,最终并没有采用这个方案。
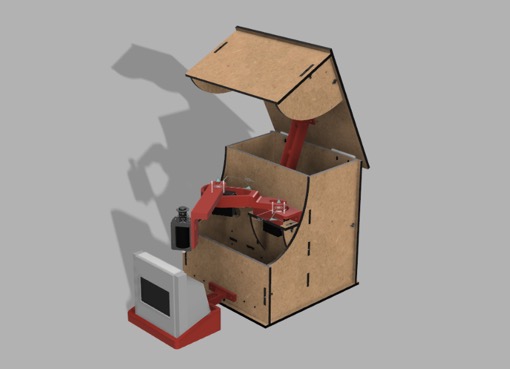
经过反复的摸索试错,最终决定采用这种形状。

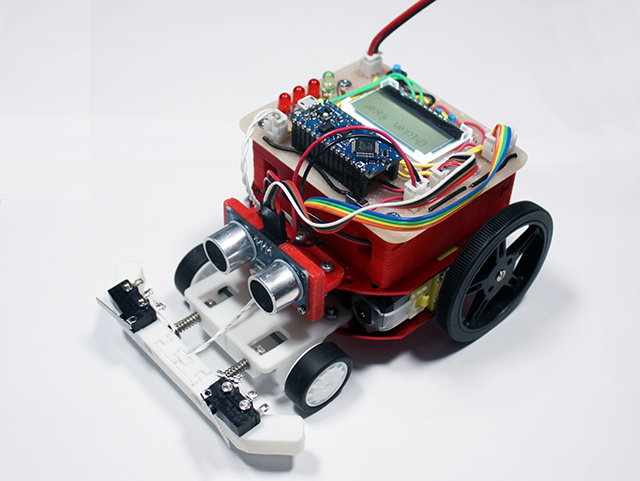
这就是该装置的内部结构。用于关闭闹钟的机械臂由两个伺服电机和一个螺线管组成。顶盖部分使用合叶进行开闭,通过伺服电机和连杆机构实现开闭。
对于形状复杂的立体部件,使用PLA树脂,利用3D打印机进行打印,而平面部件则使用激光切割机,加工4mm厚的中密度纤维板。通过这个大原则来逐个制作各个部件。

使用3D打印机打印出来的立体PLA树脂部件,再将这些部件组装成连杆机构(顶盖开闭部分)。
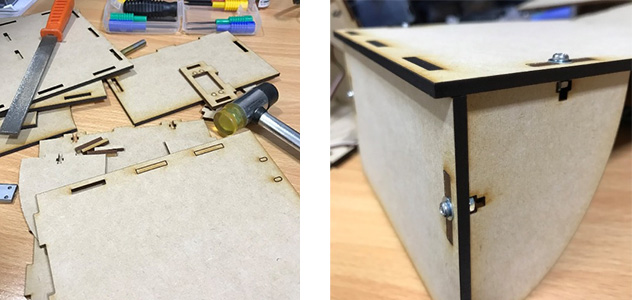
用激光切割机加工的中密度纤维板(板厚4mm)。连接部位开方孔,用于部件之间的连接。
中密度纤维板则大多使用螺丝以及木工用的粘结剂进行连接。
不断地进行部件的加工和装配……

这样,机械组装就基本完成了,形状看起来也像那么一回事。虽然还没有制作完成,但是已经可以看到整体的框架,真让人高兴啊!
电路的安装
机械部分实物的整体框架出来之后,我已经迫不及待地想让它动起来了。接下来,我们就要开始电路部分的制作了。

这次我并没有正儿八经地画电路图,只是即兴焊接完成了电路制作,实际上最好还是认真地把电路图画出来(抱歉,这话说得完全没有说服力……电路图的详细信息请参照文末的“特别附录”。)

将Arduino和万能板等主要电路部分设置在“再睡五分钟”的内部,而我们经常要接触或者确认的电子部件和端口则设置于机器人的外侧,以此来确保其操作性。 如上图照片所示,在“再睡五分钟”的背板上,从左到右提前开好了三个孔,分别安装下述三个部件:
- DC接口(插接AC适配器的DC插头)
- 钮子开关(控制电源的接通和断开)
- LED(电源接通的时候亮灯,断开的时候熄灭)
为了实现“闹钟响了之后能够立即关掉”这一功能,我们首先需要确保可以检测到“闹钟响了”这一状态。所以,这次我配备了声音传感器,用来检测闹铃的声音,再通过Arduino用来监测该信号。
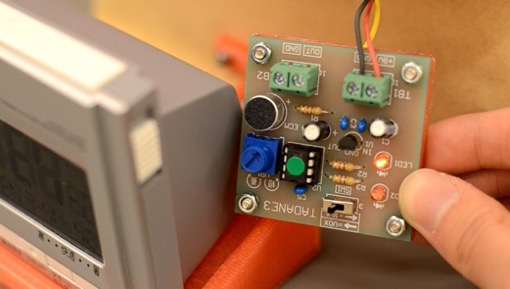
声音传感器套件(秋月电子通商)
在进行电路部分制作时,虽然我定了下述策略:
- 声音传感器直接使用市面上销售的传感器套件
- Arduino外围电路等声音传感器之外的部分,全部自己动手制作
但是并没有“所需部件应该全部外购,然后再自己动手制作”,或者“市面上销售的套件可靠性高,应该优先考虑”之类的讲究。只要符合自己的爱好,大家自行选择自己喜欢的方式即可。在“再睡五分钟”的功能实现的过程中,我采取的策略是在优先考虑缩短时间的原则下,随机应变(说得不好听一点,就是漫无目的,走到哪算哪)。
控制程序
终于到了期待已久的程序环节了!好,开干!
在没有检测到闹钟的声音时,机械臂收纳在机器人体内,当检测到闹钟的声音时,机械臂伸展出来,通过螺线管,按下闹钟的开关,这就是“再睡五分钟”的主要动作。
所以,在对伺服电机的角度和螺线管的动作进行精细的设置之后,运行程序即可实现这样的动作。
※此链接为Youtube视频 https://youtu.be/kfr-HzkAyAE
怎么样?动起来感觉还不错吧。关闭闹钟这个动作并非只是敲击按钮一次,而是连续敲击,这也是我特别注重的一个点。
我想在关闭闹钟这个动作上,体现上篇的文章中提到的“动作像宠物一样可爱”这一效果,所以我在编程的时候,将其设计成了连续敲击,模拟人们在闹钟响了之后,睡眼惺忪地砰砰砰地拍打闹钟的样子,体现闹钟响起时内心的烦躁,让这个动作更富情感意义。
外观造型
在思考创意的阶段(上篇),我也提过,这个作品要实现“外观像‘蘑菇’”的效果,取名“再睡五分钟”,所以外观必须要做得像蘑菇一样才行。

外观部分用的材料是毛毡。先根据“再睡五分钟”的主体尺寸,裁剪面料。

再进行缝纫整形,以确保它可以穿在“再睡五分钟”主体上。我上次的缝纫经历,可以追溯到小学时家庭课的课堂。这个活,还真有点不习惯,我当时是一边回想打结收针、回针缝等手法,一边咬牙坚持过来的。

套在主体上之后,从配色来看,已经初具蘑菇的模样了。但是,如果仅仅是这样,看起来未免显得有点过于单调,所以……

于是,我试着用打印纸剪出一些水珠形状,贴在上面试了一下。嗯,这才是我想要的蘑菇模样!(最终成品上贴的是水珠形状的白色毛毡)
大功告成
做好了,哈哈哈!!!

铛铛铛铛
这一瞬间,我切身体会到了电影等场景中经常出现的类似于发明家那样的人物,一边大笑一边喊着“终于···终于成功了哟···!!!哈哈哈哈”时的那种心情。世界上独一无二的大蘑菇,最特别的only one,前无古人的大发明就此完成!
它就是全自动回笼觉辅助装置“再睡五分钟”!
这项发明可以减轻受时间所束缚、受上班高峰所压迫的当代社会人们的压力,作为世界和平的象征,光芒永存。 ※此处省略一千字
因为太过高兴,有点忘乎所以了,抱歉抱歉。作品的制作过程虽然充满艰辛,但是完成时的喜悦是无可替代的,是最妙不可言的情感。
有了自己的作品,作品就会成为你的名片
我们去参加Maker Faire等展会时,自然是少不了各种各样的激动,“啊!我在网上见过这个!”“厉害!”等声音不绝于耳。同时,“创作者”一定也会出现在现场,这是网上无法体验到的激动。
“这个作品是你制作的吧!真厉害!”
“这是你制作的啊!脑回路很清奇啊(褒义)”
类似于这样令人心情愉悦的赞美充斥会场。对于喜欢手工制作的人来说,围着自己制作的作品进行交谈的时光,总能让人特别开心。而且,交谈时,往往作品先于名片登场(笑)。
我衷心期待,有一天能够跟读到最后的各位读者朋友一起,一边分享各自的作品,一边愉快地交谈。届时,让我们互相炫耀吧!
特别附录
阅读本篇文章的各位朋友,我非常期待各位试着挑战一下焊接和布线等电子制作的各个过程,所以我把我已经完成接线的电路图补画出来了!敬请参考。

全自动回笼觉辅助装置“再睡五分钟”的电路图
【关于电路图的补充说明】
・电源使用AC适配器(输出DC9V 2A)。
・半固定电阻器(VR-ADJ1、VR1、VR2,共三个)虽然并没有用于作品的正式动作之中。但是,在程序的调整过程中,会频繁用于伺服电机的角度调整和传感器的阈值调整。
・上图的声音传感器(SENS1)用的是下述产品,使用的是VOX模式。
秋月电子通商 内置PIC12F675 声音传感器套件 “TADANE3”
http://akizukidenshi.com/catalog/g/gK-06758/
本系列连载的内容
上篇:“魅力四射”的机器人制作
下篇:“魅力四射”的机器人制作(本文)
河岛 晋
1991年出生于日本福冈县北九州市。从九州工业大学研究生毕业后,一直从事电子制作套件的开发、机器人竞赛的运营、活动中的制作业务等工作。目前,主办了数字制造社区“药院Make部”,同时还在福冈县福冈市推动制造活动。多次参加机器人大赛和作品竞赛。代表作有“论文守护者”和“再睡五分钟”。