目录
- • 背景简介与设计方案
- • 制造底盘
- • 第一步:控制臂
- • 第二步:框架模块
- • 第三步:悬架模块和电机模块
- • 第四步:减震组件
- • 第五步:组装底盘
- • 结论
第四步:减震组件
减震组件估计是最容易制造的零部件了,只是一个带有一些孔的小U型材。实际上,减震组件有两种不同的类型:“框架型”和“悬架型”。这两者的区别在于用于安装减震器的孔的尺寸:一个为3mm,另一个为7mm。顾名思义,一个是安装在框架模块上,另一个是安装在悬架模块上。

图13:框架型减震组件图纸(比例1:1)
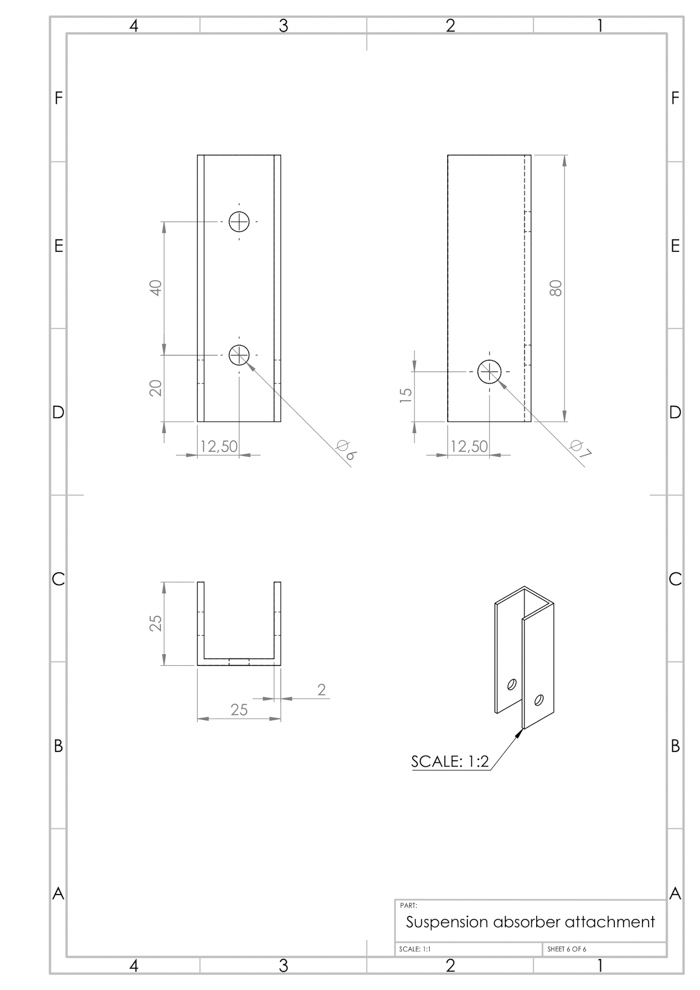
图14:框架型减震组件图纸(比例1:1)
4.1 您现在已经知道如何钻孔了。标记一侧的所有孔,然后使用2.50mm的钻头钻孔。
4.2 使用6mm钻头来扩大用于组件安装在悬架或框架模块上的孔。

4.3 如果您想要将组件安装到悬架模块上,请使用7mm钻头将侧面的2.50mm小孔进行扩孔。如果想要将组件安装到框架模块上,请使用3mm钻头。在这两种情况下,都要从型材的一侧钻孔直到穿过另一侧。

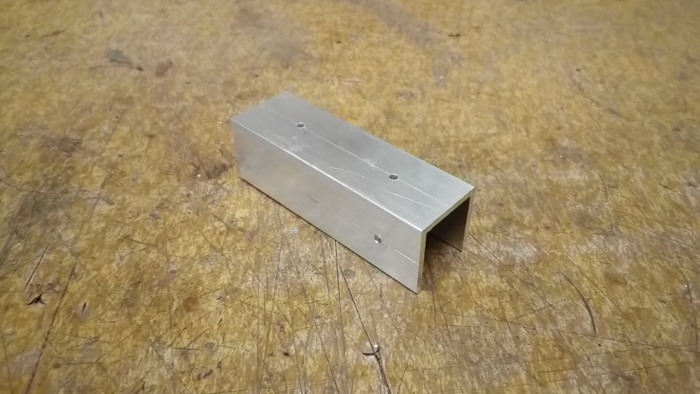
在这张图中,组件之一已经完成了!您需要六个框架型组件和六个悬架型组件。
第五步:组装底盘
此时,您应该已经有制造底盘所需要的所有零部件了,做得很棒!现在,我们可以开始组装底盘了!有趣的是:如果您在第一次尝试中完成了所有零部件的制作,那么您已经总共钻孔570 个了。
组装底盘最简单的方法是一次组装一个悬架系统。如果您重复了三次组装过程,那么您可以把所有零部件组装在一起了,最后您只需把所有的框架模块连接在一起即可。
5.1 首先,将减震组件用螺栓固定在悬架或框架模块上,每个组件由两个M5x8的螺栓连接。

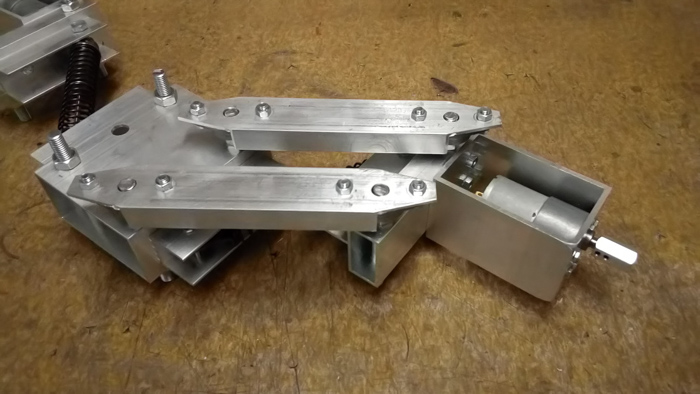
5.2 下一步是连接悬架模块和电机模块。使用四个M5x8螺栓和4个M5螺母将它们进行连接和固定。我的建议是像图中那样从悬架的内部旋入螺栓。将所有的零件拧紧,并确保两个部分对齐。
5.3 现在我们需要制作一些轴承轴。从8mm的螺纹杆切下8段,每部分长80mm。用锉刀和砂纸完成切割,这样杆的末端不会残留碎屑。然后,将螺纹杆插进框架和悬架模块上的8mm孔中,用M8螺母从两侧固定螺纹杆。拧紧螺母,但是不要用力过猛,不然可能会使铝型材变形弯曲。

5.4 用6个M3x8螺栓将37D电机安装到电机模块中。
5.5 下一步是将Pololu 12 mm的六角适配器安装到电机轴上。

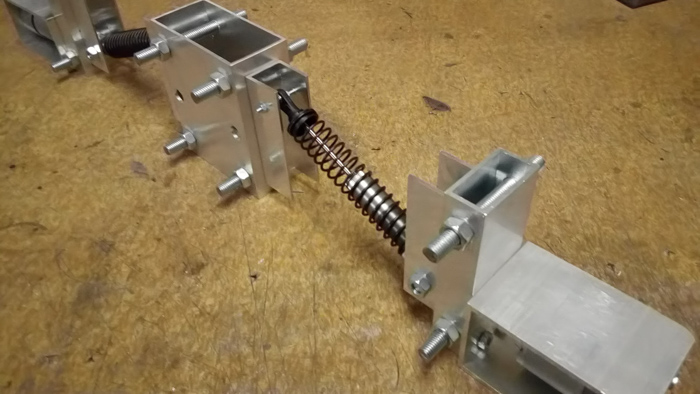
5.6 现在我们要安装减震器了。这一步通过对每个减震器使用一个M7x30螺栓(在下端)和一个M3x30螺栓(在上端)来完成。使用两个M3螺母来将减震器固定在上端M3螺栓的中间。
5.7 接下来是控制臂。将两个KFL-08轴承分别安装在每一个轴上。使用2个M5x12螺栓和两个M5螺母来连接并固定轴承。

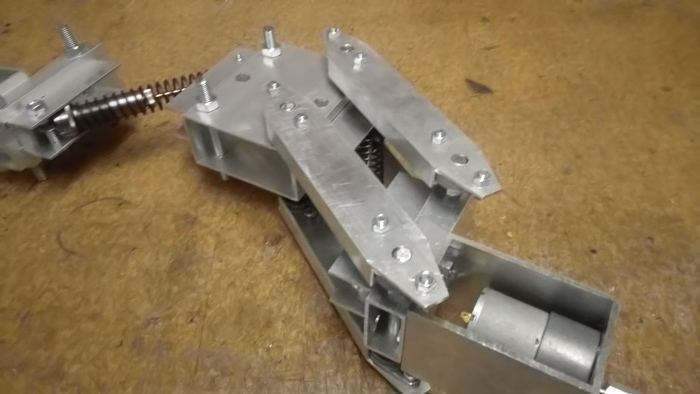
5.8 下一步我们来组装悬架。松开每个轴承上的六角螺钉,将控制臂滑至轴上。将控制臂放置在可以自由移动而又不干扰电机模块的范围内,然后再拧紧轴承中的六角螺钉。
5.9 将另外两个控制臂连接到另一侧。像之前那样,先松开六角螺钉,然后将控制臂滑至轴上,最后再拧紧螺钉。
5.10 现在,将另外四个控制臂连接到另一个悬架模块上。

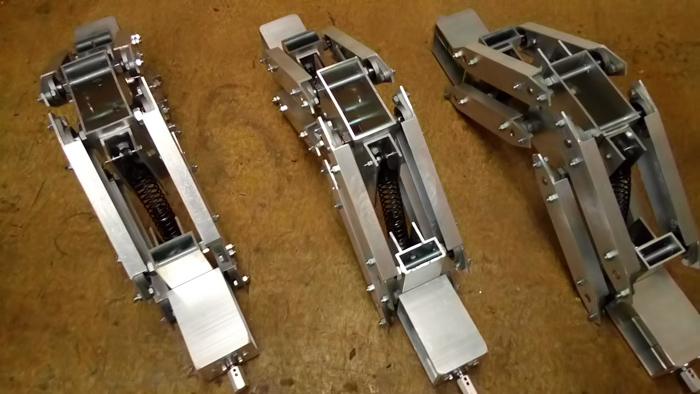
5.11 重复5.1-5.10的步骤三次,结束后您应有三对悬浮式电机。
5.12 接下来,从10mm的螺旋杆上切下两段,每段500mm长。将三个悬浮式电机与10mm的螺杆连接,用一些M10螺母将框架模块固定到位,请注意不要用力过猛,还是像之前说的那样,这会使型材发生弯曲变形。

5.13 现在,将12 mm~17 mm的六角适配器安装到车轮上。

5.14 最后一步是使用一些M4x22螺栓将车轮与电机连接。

结论
让我们看看这个项目现在的成果!在这里,您可以看到ArduRover放置于自然环境中的一些照片。






如果您已经做到了这一步,那么恭喜您!同时非常感谢您阅读这篇文章!这标志着ArduRover项目的第一部分已经结束了。如果您喜欢它并且决定要自己来完成项目制作,请与全世界分享您的创作吧!像往常一样,如果您有一些觉得需要更改或想要进一步改善的建议,我的GitHub 中的Issues专栏将是您提出见解的绝佳途径。或者,您也可以使用本文下方的评论栏与我交流讨论。
现在,我们这台令人惊奇的新型机器人只不过是一堆铝材和钢材,放置在车库里,积上灰尘,毫无用处。希望在项目的下一阶段,在我们加上所有可以安装到机器上的电缆、传感器、电子设备和电池后,情况会发生改变。敬请关注!
Jan Gromes
Jan 目前在布尔诺工业大学学习电气工程。他有多年使用Arduino和其他微控制器来构建项目的经验,对于机器人系统的机械设计十分感兴趣。

















