这篇文章来源于DevicePlus.com英语网站的翻译稿。
在上一个教程中,我们介绍了ESP8266-01(ESP8266 设置教程)。这是一款小巧的WiFi模块,能够让用户轻松地为他们的项目添加WiFi功能。今天,我们将讨论nRF24L01+ RF 模块。该模块是ESP8266 ESP-01的姊妹模块,旨在让用户在项目中集成无线射频通信功能。nRF24L01+和ESP8266 ESP-01具有相似的外形尺寸和引脚布局(乍一看甚至完全相同)。但是两者的控制方式和功能完全不同。在本教程中,我们将介绍使用该RF模块所需的基础知识,同时还会介绍该模块如何与其他RF模块和微控制器通信。就本教材而言,我们将演示该模块如何与Arduino Uno微控制器相连。
nRF24L01+基于Nordic Semiconductor nRF24L01+,是一种“用于2.4GHz ISM(工业、科学和医疗)频段的RF收发器IC”。
规格参数:
2.4GHz ISM 频段运行
Vcc标称电压为3.3V(耐压输入5V)
片上稳压
无线传输速率为250kbps、1Mbps、2Mbps
超低运行功耗
低电流消耗(900nAsISM频段
6个数据通道
首先,我们来介绍以下该模块的硬件部分。与ESP-01类似,该RF模块配有4×2公头接口。然而,模块的实际引脚布局与ESP-01模块不同,这是因为该RF模块利用不同的通信协议——利用不同的与其他设备通信。如果您想了解有关SPI协议的更多信息,请查看我们的Arduino Arduino通信协议教程!
RF模块的引脚布局如下图所示。此信息来源于Addicore。
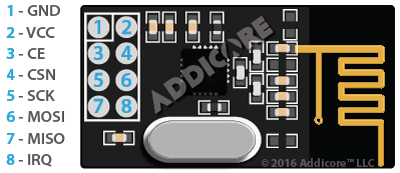
图1.nRF24L01+ RF模块的引脚说明/ ©Addicore
根据设置,该RF模块属于SPI从器件,这意味着它只能与具有专用SPI通信线路的器件一起工作。因此,图中显示的SPI MOSI、MISO和SCK(时钟)引脚必须连接到微控制器上的相应引脚。在Arduino上,这些引脚的定义如下:
- MOSI: Arduino D11
- MISO: Arduino D12
- SCK: Arduino D13
CE和CSN引脚可以连到Arduino上的任何输出GPIO引脚。在软件中,SPI通信初始化时系统会指定这些引脚。
RF模块与Arduino之间的连接示例如下:
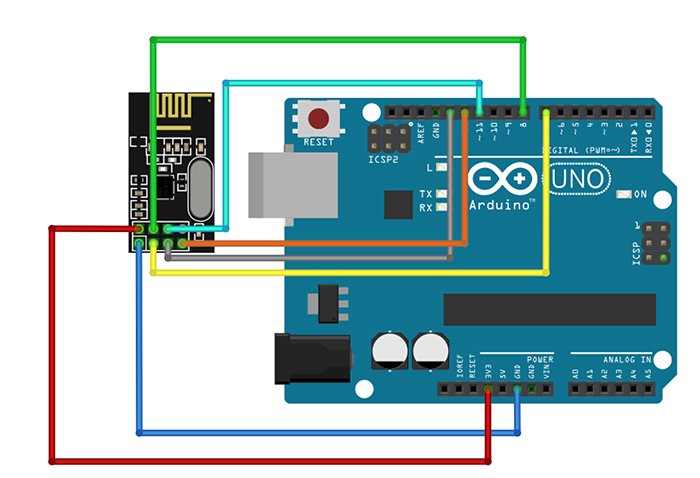
图2.CE和CSN引脚(图中的黄色和绿色线)可以连至任意两个未使用的数字引脚。在软件中,您应该在构造RF模块对象时指定这些引脚。
为了连接Arduino与该模块,我们将使用TMRh20的RF24库。该库能够方便地将RF模块和MCU之间的低级通信打包成一个易于使用的C++类。
开始使用该模块之前,我们将首先介绍一些背景基础知识。在美国,射频设备能够使用的频率仅限于FCC分配的频率范围。ISM频段是为科学和医疗仪器保留的一个频率范围,我们的RF模块将使用该ISM范围内的频率进行通信。使用RF模块时,我们无需了解这些频率的细节或者通信是如何在这些频率上发生的。我们将专注于可以控制的无线RF通信内容。
如果滚动浏览RF24库文件,您会注意到里面有许多参数可以设置。关键参数如下所示:
- 信道:通信发生的特定频率信道(频率映射为0到125之间的整数)
- 读取通道:读取通道是指一个唯一的24位、32位或40位地址,模块从该地址读取数据
- 写入通道:写入通道是模块写入数据的唯一地址
- 功放(PA)级别:PA级别负责设定芯片的功耗,从而设定传输功率。就本教程而言(与Arduino一起使用),我们将使用最小功率设置。
RF24库文档页面提供了一些入门的优秀示例代码。示例项目的地址如下:https://tmrh20.github.io/RF24/examples.html
接下来,我们在“Getting Started”Arduino代码中查看一下上文列出的参数是如何初始化的。“Getting Started”(入门)代码的地址如下:
https://tmrh20.github.io/RF24/GettingStarted_8ino-example.html
GettingStarted.ino
/*
* Getting Started example sketch for nRF24L01+ radios
* This is a very basic example of how to send data from one node to another
* Updated: Dec 2014 by TMRh20
*/
#include <SPI.h>
#include "RF24.h"
/****************** User Config ***************************/
/*** Set this radio as radio number 0 or 1 ***/
bool radioNumber = 0;
/* Hardware configuration: Set up nRF24L01 radio on SPI bus plus pins 7 & 8 */
RF24 radio(7,8);
/**********************************************************/
byte addresses[][6] = {"1Node","2Node"};
// Used to control whether this node is sending or receiving
bool role = 0;
void setup() {
Serial.begin(115200);
Serial.println(F("RF24/examples/GettingStarted"));
Serial.println(F("*** PRESS 'T' to begin transmitting to the other node"));
radio.begin();
// Set the PA Level low to prevent power supply related issues since this is a
// getting_started sketch, and the likelihood of close proximity of the devices. RF24_PA_MAX is default.
radio.setPALevel(RF24_PA_LOW);
// Open a writing and reading pipe on each radio, with opposite addresses
if(radioNumber){
radio.openWritingPipe(addresses[1]);
radio.openReadingPipe(1,addresses[0]);
}else{
radio.openWritingPipe(addresses[0]);
radio.openReadingPipe(1,addresses[1]);
}
// Start the radio listening for data
radio.startListening();
}
void loop() {
/****************** Ping Out Role ***************************/
if (role == 1) {
radio.stopListening(); // First, stop listening so we can talk.
Serial.println(F("Now sending"));
unsigned long start_time = micros(); // Take the time, and send it. This will block until complete
if (!radio.write( &start_time, sizeof(unsigned long) )){
Serial.println(F("failed"));
}
radio.startListening(); // Now, continue listening
unsigned long started_waiting_at = micros(); // Set up a timeout period, get the current microseconds
boolean timeout = false; // Set up a variable to indicate if a response was received or not
while ( ! radio.available() ){ // While nothing is received
if (micros() - started_waiting_at > 200000 ){ // If waited longer than 200ms, indicate timeout and exit while loop
timeout = true;
break;
}
}
if ( timeout ){ // Describe the results
Serial.println(F("Failed, response timed out."));
}else{
unsigned long got_time; // Grab the response, compare, and send to debugging spew
radio.read( &got_time, sizeof(unsigned long) );
unsigned long end_time = micros();
// Spew it
Serial.print(F("Sent "));
Serial.print(start_time);
Serial.print(F(", Got response "));
Serial.print(got_time);
Serial.print(F(", Round-trip delay "));
Serial.print(end_time-start_time);
Serial.println(F(" microseconds"));
}
// Try again 1s later
delay(1000);
}
/****************** Pong Back Role ***************************/
if ( role == 0 )
{
unsigned long got_time;
if( radio.available()){
// Variable for the received timestamp
while (radio.available()) { // While there is data ready
radio.read( &got_time, sizeof(unsigned long) ); // Get the payload
}
radio.stopListening(); // First, stop listening so we can talk
radio.write( &got_time, sizeof(unsigned long) ); // Send the final one back.
radio.startListening(); // Now, resume listening so we catch the next packets.
Serial.print(F("Sent response "));
Serial.println(got_time);
}
}
/****************** Change Roles via Serial Commands ***************************/
if ( Serial.available() )
{
char c = toupper(Serial.read());
if ( c == 'T' && role == 0 ){
Serial.println(F("*** CHANGING TO TRANSMIT ROLE -- PRESS 'R' TO SWITCH BACK"));
role = 1; // Become the primary transmitter (ping out)
}else
if ( c == 'R' && role == 1 ){
Serial.println(F("*** CHANGING TO RECEIVE ROLE -- PRESS 'T' TO SWITCH BACK"));
role = 0; // Become the primary receiver (pong back)
radio.startListening();
}
}
} // Loop
首先,我们需要注意文件顶部的两个C++ #include指令:一个用于包含Arduino SPI库(前文提到RF模块使用SPI与Arduino通信),另一个用于包含RF24库。
#include <SPI.h>
#include “RF24.h”
接下来,我们需要注意构造RF24对象的这行代码:RF24 radio(7,8); 传递给构造函数的两个参数是连至模块的CE和CSN数字引脚。MOSI、MISO和SCK引脚必须分别是数字引脚11、12和13,可是CE和CSN引脚可以连接任意两个数字引脚!
接下来,我们来看一下读写通道地址。您可能猜到了,写入和读取通道地址在两个彼此通信的无线设备之间是互换的,因为一个无线设备的写入通道是另一个的读取通道。无线通讯地址的大小为24位、32位或40位。在示例代码中,这些地址是从C++字符串文字转换而来,但您也可以以二进制或十六进制格式指定它们。比如,指定为十六进制的40位地址可以是0xF0F0F0F0F0。存储写入和读取通道地址时,一个良好的编程实践是将两个值放在一个数组中。在示例代码中,写入和读取通道的地址存储在名为“地址”的字节数组中。
在void setup()方法中,我们需要说明如何使用地址通道参数和其他参数初始化无线设备。
首先,系统调用RF24::begin()方法。针对radio对象调用其它RF24库之方法之前,必须先调用begin() ,这是因为该方法负责初始化RF芯片的运行。
接下来,系统调用RF24::setPALevel() 方法,以设定功放(PA)级别。为了指定功放级别,RF24库提供了不同的常数值。更高的PA级别意味着模块可以实现更长距离的通信,但是在运行期间会消耗更多的电流。作为入门程序,我们将RF_24_LOW常数作为一个参数传递给setPALevel()方法,因为两个通信模块之间的距离不会很大。一般来讲,该RF模块与Arduino板配合使用时,我们应该保持PA级别尽可能地低,从而减少Arduino稳压电源的电流消耗。
接下来,我们将讨论如何初始化写入和读取通道。我们已经将写入和读取通道定义为一些字节值。现在,我们必须将这些定义传递给radio对象,这样它才会知道写入和读取通道地址。系统用openWritingPipe() 方法设定写入通道;用openReadingPipe()方法设定读取通道。打开写入和读取通道的示例如下:
radio.openWritingPipe(addresses[1]);
radio.openReadingPipe(1, addresses[0]);
请注意,我们还必须为openReadingPipe()方法传递一个额外的整数参数,指明初始化哪个读取通道。这是因为RF模块在给定时间最多可以打开6个读取通道!
示例代码通过一个role布尔值来适当分配读取和写入通道值。根据role的值,程序确定RF模块是ping设备还是pong设备。您的其他项目也可以使用类似代码。但是,要确保两个设备的读写地址互换,否则无法实现数据传输或读取!
调用RF24::startListening()方法之后,无线模块开始侦听。需要注意的是,指示RF模块开始监听数据之前必须初始化读取通道(即调用startListening()方法之前必须先调用openReadingPipe()方法!)
类似地,RF24类还提供了一个stopListening()方法,无线模块开始写入之前必须首先调用该方法。
在示例代码中,您可能会注意到程序利用RF24::available()方法告知无线电模块检查传入的数据。这与我们之前见过的Serial::available()和SoftwareSerial::available() 方法类似——如果RF连接上的数据可用,那么available()方法返回真,然后就可以读取数据了。
最后,RF24类提供了实际数据写入和读取的方法。RF24::write()与RF24::read()方法的参数包括(1)指向与传输数据类型相同的变量的指针,以及(2)传输数据的大小。在read()方法中,指针指向的变量负责接收正在读取的数据。在write()方法中,指针指向的变量负责保存正在写入的数据。在这两种方法中,我们必须确保指针指向与传输数据类型相同的变量,并且传递给方法的大小实际上反映了数据的大小。将不正确的类型或大小值传递给read()和write()方法可能会产生不希望的值截断,从而导致传输的数据无用。在“Getting Started”代码中,需要传输的数据是一个unsigned long类型。因此,传递给read()和write()方法的指针参数也应该指向一个unsigned long型的变量。很明显,传输数据的大小始终是unsigned long类型变量的大小。在这种情况下,大小并不需要用一个整数进行传递,大小(size)参数可以简单地写为sizeof(unsigned long)。
“Getting Started”(入门)代码中唯一没有涉及的参数是信道(communication channel)。如果需要指定具体信道(比如您有多个RF网络,不希望彼此干扰),那么可以将一个8位的整数参数传递给RF24::setChannel() 方法,以设置信道。其代码示例如下:radio.setChannel(10);
请将两个RF模块连到两个独立的Arduino板上,并且都上传“Getting Started”(入门)代码(您必须将其中一块板的role布尔值改为1)。您现在应该能够根据相应的ping时间发送消息并且接收返回的消息了!下图是“ping”和“pong”两个串口监视器的并排截图:
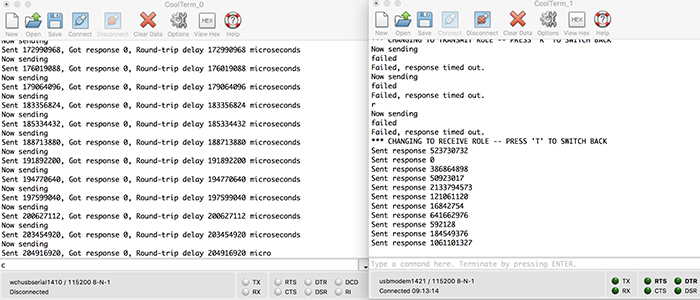
图3.左:“ping”监视器语句(设备1);右:“pong”监视器语句(设备0)
恭喜您完成nRF24L01+教程的学习!您现在已经掌握了使用这些漂亮RF模块研发相关项目的技能和知识了!要了解涉及这些RF模块的项目,您可以浏览Device Plus博客!

Rahul Iyer
Rahul是加州大学洛杉矶分校电气工程学院的学生,爱好电子和机器人项目,尤其热衷于电动汽车技术和辅助机器人技术。

















