前情提要
上次,一濑第一次有机会与Sugiken老师一起参加与客户之间的会议。他本来干劲十足,但会议中却根本无法跟上会谈,于是倍感沮丧。意识到自己的不足,一濑请求Sugiken老师对会议内容重新进行讲解。
出场人物介绍

一濑(主角)
新手工程师。从中学起,就立志成为一名工程师,毕业后进入ROHM。一濑废寝忘食地学习电机驱动器相关的知识,对此充满激情。现在只有他可以看见驱动君和小甜心。
二宫
与一濑同期进入ROHM的女孩。成绩优异,经常排名第一。性格强势,但勤奋上进,对一濑也甘拜下风。同时还是Sugiken 秘密的忠实粉丝。
Sugiken
ROHM的超级工程师。平时为人和善,但有时也很热血。对于工程师的工作充满热情和自豪感。过去,Sugiken也可以看见驱动君和小甜心,但现在已经看不见了。
驱动君
电机驱动器精灵,非常喜欢与电机有关的人和熟悉电机的人。暗恋小甜心,时常被迟钝的小甜心捉弄。
小甜心
电机精灵,和驱动君青梅竹马。非常熟悉电机,其知识丰富程度与驱动君相比,有过之而无不及。是一位稳重的大姐姐,但是一旦涉及爱情,就变得迟钝,完全没有察觉到驱动君的想法。
Sugiken老师 简介
在ROHM的电机LSI事业部任技术主干(专家)之职,负责为电机驱动器IC开发提供各种技术方面的建议与指导,也负责开发旨在改善电机特性的新驱动算法,并担任公司内部和外部电机相关培训课程的讲师,还会举办一些电机技术讲座等活动。
无刷电机的性能要求(静音和可靠性)



在上一集也就是第8集中,简单介绍了无刷电机所需具备的效率、静音性和可靠性这三项基本性能,然后详细探讨了其中的“效率”。本集我们将探讨另外两项性能:静音性和可靠性。
第9集目录
电机的噪声和产生原因
首先,我们来谈谈什么是噪声。
通常,使用电机驱动的产品需要具备良好的静音性。但是,判断是否为噪声的标准会因其是否令人介意、还是有其他声音混杂等因素而有所不同。
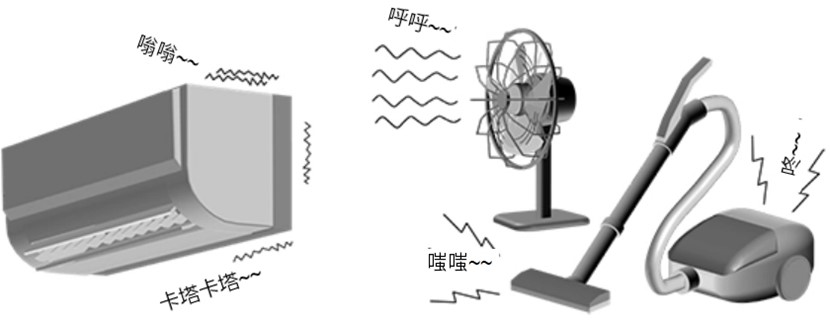
例如,风扇等产生的风声会被认为是“很正常的声音”,不会有人太在意;吸尘器工作时的声音可能会被视为吸尘力道大才有的声音。另外,对于工厂中运转的机器和设备通常也不要求静音性。但是,冰箱和空调等的振动音、前面提到的风扇除了风声以外的声音会被视为“噪声”。
可见,“声音”的判断标准会因环境和用途而异,在某些应用中不是问题的声音,在另外的应用中可能是应该解决的问题。电机驱动器可以驱动各种应用中使用的电机。因此,电机驱动器开发人员不能仅仅了解某个应用领域的噪声知识和判断标准,而是需要掌握各种噪声知识。
在这里,我将举例说明在电机运转时可能会被视为问题的声音。
电机所产生的声音主要有两种。一种是电机作为激振源所产生的声音;另一种是电机本身所发出的声音。
电机作为激振源所产生的声音是将电机组装在电气产品中后,从电气产品发出的声音。因此,噪声程度往往因与电气产品之间的“兼容性”而异,可以说是一种评估难度很高的声音。这种声音包括振动音、冲击音和共振音。
电机本身所发出的声音是电机单体运转时也可以听到的声音。这种声音包括电磁音和轴承音。
这些噪声的分类示例和主要产生原因见下图。关于引发噪声的主要原因,在这里将探讨转矩脉动、转矩波动、线圈振动和摩擦音。 另外还进一步列出了造成这些情况的主要因素。虽然引发噪声的原因有很多,但是可以说其中唯一与电机驱动器无关的因素是齿槽因素。当然,并不是其他因素都是电机驱动器引发的,但是当将一个电机驱动器替换为另一个不同规格的电机驱动器时,声音情况可能会发生变化,因此电机驱动器被视为“对于噪声而言非常重要的器件”。
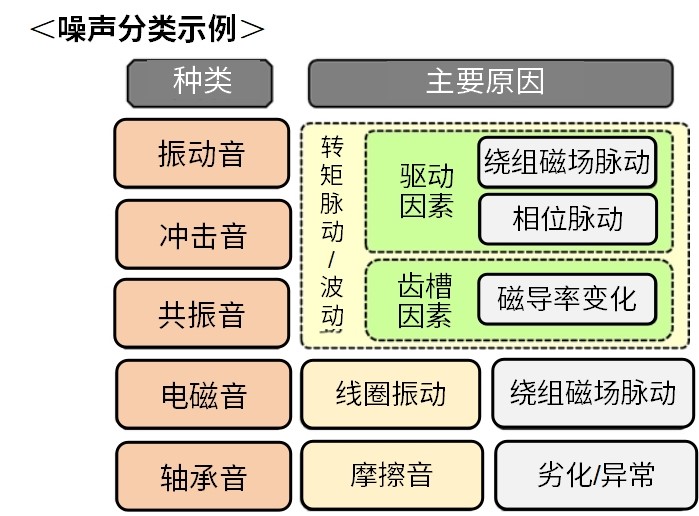
因此,设计电机驱动器需要了解噪声及其产生原因相关的知识。接下来,我将按顺序逐一进行讲解。在上图中,之所以将电机作为激振源所产生的声音分为振动音、冲击音和共振音,是因为这些噪声的音色和听到它们时的感觉是不同的。实际上,并非所有噪声都可以明确地归类到这些噪声中。我们需要了解它们的主要原因,无需太过纠结分类。
<振动音和冲击音>
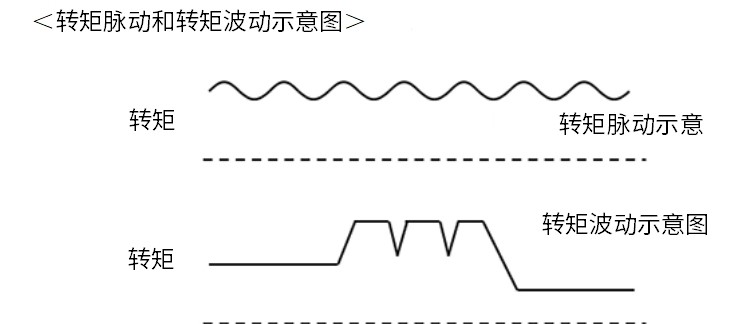
振动音是由电机的转矩脉动以振动的形式传递到电气产品本体而引起的噪声,会发出诸如“咔嗒咔嗒”或“嗡嗡”等声音。冲击音则给人一种因转矩急剧变化而撞击电气产品本体的听觉印象。这些噪声在电机所产生的转矩脉动和转矩波动(如下图所示)较大时产生。
<共振音>
共振音是由电机、电气产品、负载体(风扇等)的共振频率耦合产生的声音。例如,当电机使风扇转动时,只有在共振频率与转矩脉动频率一致时可能会产生嗡鸣声。当电机的转矩脉动频率取决于电机的转速时,只会在特定的转速下产生噪声。这种共振音即使在转矩脉动较小时也比较容易产生。
需要注意的是,哪怕以往并没有什么问题,但是在改变所使用的转速、减轻负载体的重量(改变重量)、改变负载体所连接的曲轴规格等情况下,可能会导致共振频率和转矩脉动频率一致而引发共振音。
<转矩脉动>
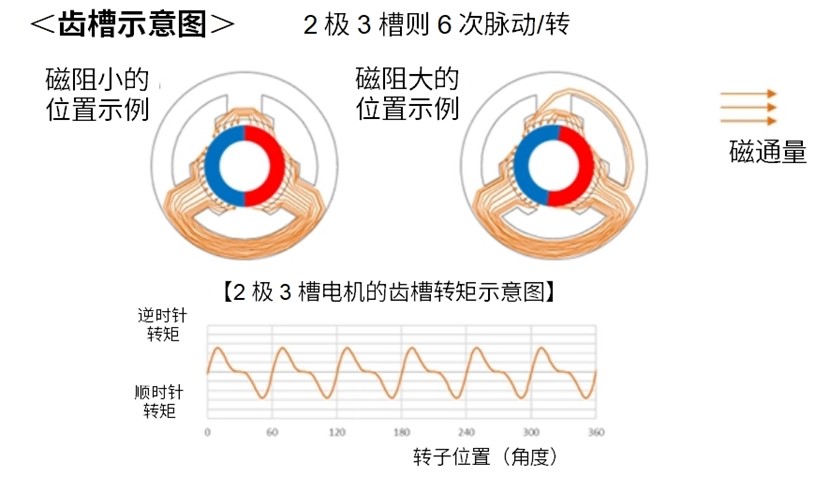
转矩脉动是引发噪声的原因之一,如第7集中提到的,绕组磁场的较大脉动、绕组磁场与永磁体之间的相对角度脉动均会引起转矩脉动(第7集 无刷电机:转矩脉动、无刷电机:正弦波驱动(正弦波激励))。除此之外,还有一种被称为“齿槽转矩”的转矩脉动。齿槽转矩是由电机的定子铁芯(铁芯)和永磁体相互作用时的磁阻变化引起的。这里的磁阻变化是指以从永磁体的N极出来的磁通量穿过气隙进入定子铁芯并穿过定子铁芯内部返回S极这个过程中的磁通量的通过难易度(磁导率)为指标,磁通量容易通过的转子位置即为磁阻小的位置。当转子位置从磁阻小的位置移开,磁通量的通过难易度发生变化(恶化)时,将产生试图返回到磁阻小的位置的转矩。这种转矩就是齿槽转矩。通常,如下图所示,一个2极3槽的无刷电机,一转(旋转一圈)共有6个磁阻小的位置。因此,齿槽转矩在一转中共有6次脉动。另外,如果无刷电机是4极6槽的,则一转中有12次脉动。可见,齿槽转矩的脉动数量会因极数和槽数而异。 虽然这种齿槽转矩不是受电机驱动器规格影响的转矩脉动,但需要记住,这是引起噪声的因素之一。
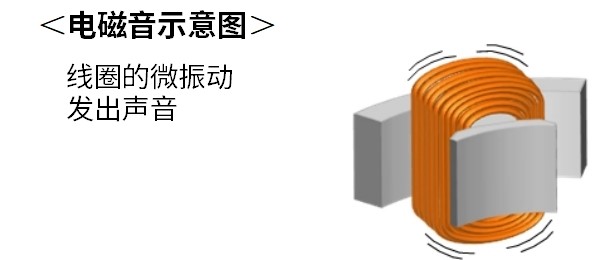
<电磁音>
在这里,电机的线圈因磁力而振动产生的声音称为“电磁音”。当流过绕组的电流发生急剧变化时,会产生电磁音。这种急剧变化在PWM控制造成对绕组端子施加的电压发生变化时,也会产生。因此,当产生与PWM频率一致的声音时,有时也称之为“PWM音”或“开关音”。另外,线圈的振动有时听起来就像敲击电机组件的声音。在这种情况下,声音不一定与PWM频率吻合。
<轴承音>
轴承音是由轴承部位的零部件摩擦等而产生的声音。对轴承部位的机械压力会导致变形、划痕、润滑剂减少等现象,而这些会使噪声变大。这种噪声看似与电机控制无关,但实际上有这种现象发生:受施加给绕组的电压影响,轴承组件会带电,诱发的火花导致轴承表面受损,最终导致噪声变大。这种现象被称为“电腐蚀”,通常认为与电机控制有关。 可见,电机驱动控制与噪声及其产生原因息息相关,不仅会引发诸如转矩脉动和电磁音等与电机驱动器的规格密切相关的噪声,也可能会引发看似无关的噪声。在开发和设计电机驱动器时,也需要先了解这些现象。
噪声测量
前面我们探讨了电机相关的噪声。接下来,我来介绍一下其基本测量方法。
噪声测量是在可以屏蔽外部声音的专用房间中进行的。这种房间主要分两种,可以根据需求区分使用。一种被称为“消音室”,不仅具有屏蔽外部声音的功能,还具有抑制被测物产生的声音在消音室中的回声的功能(吸音性能)。另一种被称为“隔音室”,具有屏蔽外部声音的功能,但没有类似于消音室那样的抑制回声的吸音功能。
接下来,我们来看测量方法。在测量室中,首先需要确定使被测物在哪种状态下进行噪声测量。举几个关于状态的例子:电机单体;将电机安装在电气产品中的状态;如果有可以预测类似空调室内机安装在房屋墙壁上的状态的装置,则模拟该状态进行测量。
接收声音(拾音)的麦克风的位置也很重要。因为声音是有方向性的,所以需要将麦克风放置在易于检测到噪声的位置。另外,还需要考虑到实际使用时周围可能有人的位置来放置麦克风。因此,为了更准确地测量噪声,可以在被测物周围的多个方向上(而不仅仅一处)布置麦克风进行测量。
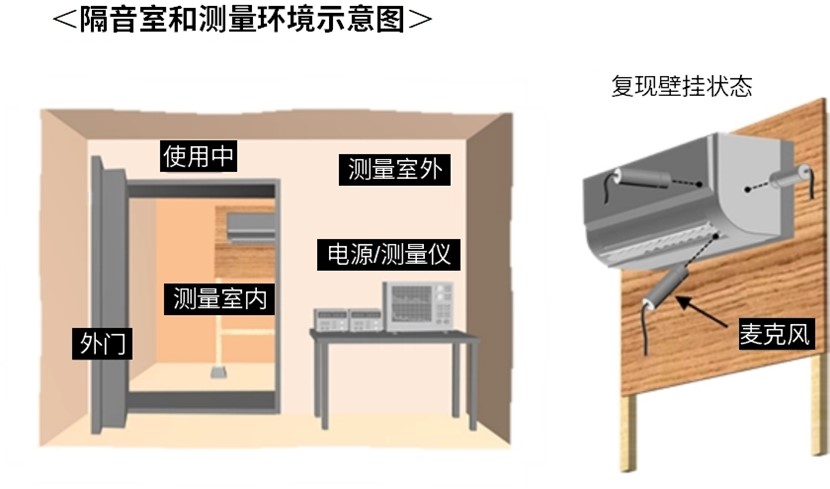
电源和测量仪器通常放置在测量室之外。这是为了防止这些设备产生的声音妨碍测量。将测量室内部的麦克风与测量室外部的测量仪器连接起来即可测量,可将噪声转换为数据并进行分析。 测量结果的原始信号是类似图中的电压信号。纵轴表示声音大小,横轴表示时间长度。通过这些信号,可以大致比较噪声的大小,并确认发出噪声的时间点。

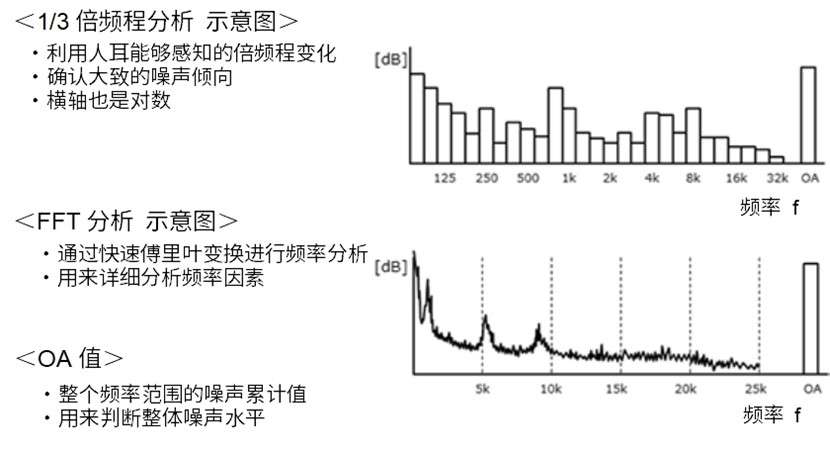
要确认所测得的噪声中包含哪些频率分量,可使用倍频程分析和FFT分析。这些频率分析非常有助于判别噪声(异常音)的原因。 倍频程分析以条形图来显示各频段声音的大小,可以从中读取所产生噪声的大致频段。在FFT分析中,通过折线图来表示每个频率的详细噪声值。这种分析有助于确认特定频率的噪声。另外,每种分析方式都可以测出OA值,也就是整体噪声值。
在测量过程中,有时需要进行听感校正(频率校正、频率加权)。这是因为实际的声压级测量值与耳朵听到的声音大小之间存在感官差异,因此需要根据耳朵对不同频率声音的灵敏度来校正声音大小。校正特性包括A计权和C计权,具体取决于校正程度。测量噪声时,可从A计权、C计权和Z计权(无校正,FLAT计权)中选择进行测量。
在噪声测量及其验证工作中,需要确认倍频程分析或FFT分析的各种噪声值和OA值,在某些情况下还需要改变校正特性进行测量,以判断噪声。
<噪声验证示例>
例如,准备好具有不同性能的电机驱动器,通过仅替换这些驱动器并比较电机的噪声,就可以了解每种电机驱动器的特征。具体而言,当比较120度方波驱动与正弦波驱动的电机驱动器时,转矩脉动产生的频率声音是不同的,只要PWM频率不同,其频率差异也可以作为声音数据进行确认。如果要确认这些声音是否会对整体噪声水平造成了影响,就需要比较OA值。 前面我们已经了解了噪声的测量方法。在实际确认噪声时,听感也很重要。这里的听感是指人的耳朵听到声音时的感觉和印象。在使用仪器进行测量之前,需要先通过听感来确认声音。通过逐渐提高或降低电机的转速,来确认整个转速范围内的声音,并通过在被测物周围移动来确认声音的方向性。另外,要想消除引起噪声问题的原因,并判断噪声是否已得到改善,不仅要通过数据,还要通过听感来确认改善情况。
本文的关键要点
・噪声包括振动音、冲击音、共振音、电磁音和轴承音等声音,但这些声音是否可接受的判断标准因用途而异。
・电机驱动器被视为与大多数噪声的产生原因有关的重要器件。
・噪声是在可以屏蔽外部声音的专用房间(消音室、隔音室)中测量的。
・利用声音测量的原始信号和频率分析结果,判断噪声是否可以接受或进行原因分析。
・噪声的确认不仅需要数据测量,听感也很重要。
电机电路的可靠性
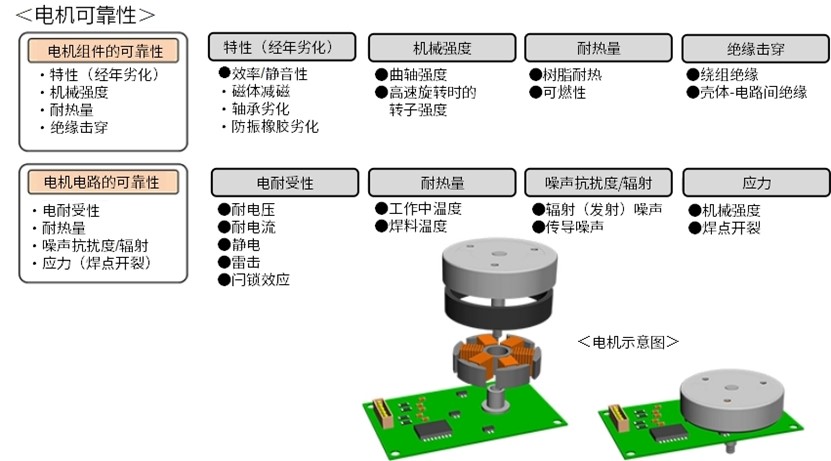
可靠性是电机的重要性能。这里所说的可靠性,简单地说,就是不容易坏、安全、性能有保障。 电机既是执行机械动作的设备,也是电气设备,因此既需要具备机械角度上的可靠性,也需要具备电气角度上所要求的可靠性。因此,我将从这两个角度出发,按顺序讲解可靠性相关的主要项目(下图)。
<电机组件>
电机组件(组成单元)的可靠性有特性保证(包括效率、静音性及其经年劣化等)、机械强度(也包括劣化)、耐热能力(包括树脂溶解和可燃性等)、绝缘强度(本来不通电的位置的抗击穿能力)等。这些项目是通过电机制造商进行仿真和验证测试而获得的相应数据来保证的。
<电机电路>
电机电路的可靠性包括电耐受性、耐热性、噪声相关性能、应力耐受性等项目,电机驱动器与这些可靠性项目息息相关。
◆电耐受性
电耐受性包括可以施加的电压(耐电压)和可以流过的电流(耐电流),对于LSI而言,这些值为绝对最大额定值。
抗静电能力是电机受到外部静电作用时不被损坏的能力。检测抗静电能力的静电测试方法有两种,一种是将静电施加于整个电机电路,另一种是仅将静电施加于LSI本身(电机驱动器IC的各个引脚)。
抗雷击能力是指假设因雷击等导致电机被施加了高电压的情况下的耐受特性。
闩锁效应是半导体结构中固有的寄生晶闸管误导通时的异常现象。通过在IC引脚上施加电压或电流,测量直到误动作前对该电压或电流的耐受能力。
另外,某些情况下也会要求在插拔连接器接线时不会发生电路损坏或危险,这也属于电耐受性范畴,在广义上也是一种抗浪涌能力。
◆耐热性
耐热性是指绕组和电子组件可以承受的温度。该温度不仅要考虑到环境温度,还要考虑到自发热。电机电路的功率晶体管部位和电机的绕组部位会流过大电流,因此发热量可能会较大。如果温升过高,可通过配备能够抑制电流的过电流保护功能,来确保可靠性。
◆电磁噪声
电磁噪声性能既要求具有抗外部噪声干扰的能力(不误动作等),也要求抗自身发出的噪声干扰的能力。每种噪声都可以通过空气和接线(电线)传播。
◆应力
应力是指机械强度。在电路中,要求LSI封装的强度足够,要求连接印刷电路板和电子元器件的焊料部分也不能产生裂纹。 下面,我将重点介绍这些可靠性项目中的EMC(电磁兼容性)。EMC包括电磁敏感度和电磁干扰两部分。
EMC(电磁兼容性)
EMC(电磁兼容性)是指电子设备和装置不发射影响其他设备的电磁噪声,反之,即使暴露于其他产品的电磁噪声中也能继续正常运行的能力。
当电机驱动器进行PWM控制时,就变成一个频繁开关绕组端子电压的设备,这可能会成为电磁噪声源。另外,电机驱动器控制的电机为旋转体,一旦运行异常可能会造成人身危险。因此,其暴露于噪声环境时的表现也非常重要。可以说,对于电机驱动器而言,EMC是一项必须要考虑的重要特性。
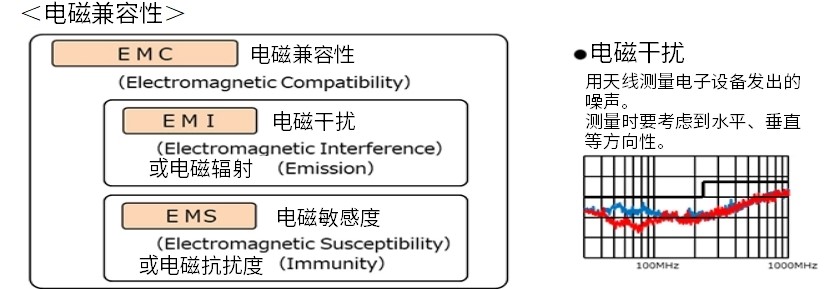
发出电磁噪声干扰的特性称为“EMI(电磁干扰)”或“电磁辐射”。其测量通常在可屏蔽外部无线电波的“电波暗室”中进行。测试内容基于JIS等已经标准化的标准进行,被测物的EMI特性需要符合相应的标准。
EMI又分通过空间传输的辐射发射和通过电缆等传输的传导发射,前者的主要测量频段通常在30MHz~1000MHz左右,而后者的主要测量频段通常在150kHz~30MHz左右。
受电磁噪声干扰的特性称为“EMS(电磁敏感度)”或“电磁抗扰度”。这里所述的“电磁噪声”,也包括前面提到的静电和雷击。
在称为“辐射抗扰度测试”和“传导抗扰度测试”的测试中,通过天线的无线电波辐射和对电缆施加噪声脉冲来确认设备是否发生了误动作等情况。 电子元器件的静电测试是EMS测试中的一种,主要包括三项测试(见下图)。HBM是模拟人体静电放电的测试,MM是模拟设备静电放电的测试,CDM是模拟元器件本身累积电荷后放电情况的测试。
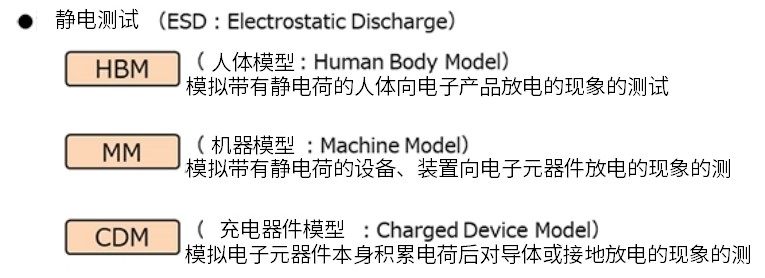
HBM是对150pF左右的电容充电后,再经由1.5kΩ的电阻对外放电。MM是对200pF左右的电容充电,无电阻(或有电感器)放电。CDM通过在电极板和电子元器件之间夹入绝缘板制作成虚拟电容器,在这种状态下对电子元器件施加电压以对虚拟电容器进行充电,然后将电子元器件的引脚与参考电位的导体连接,使其充放电。
这样,通过改变电容量和放电电阻,即可模拟不同情况进行测试。
※电容量和电阻值会因规格而异,这里仅为参考示例。
本文的关键要点
・这里所说的可靠性,简单地说,就是不容易坏、安全、性能有保障。
・电机既是机械旋转体,又是电气设备,因此需要具备这两个角度的可靠性。
・由于电机驱动器是控制电机机械工作的电子器件,因此需要从上述两个角度出发进行设计。
・在电磁兼容性(EMC)方面,需要具备作为电磁干扰和电磁抗扰度两方面的可靠性。