●问题的内容
本次的问题源于类似下面的经历。
感应电压是指手动旋转无刷电机的曲轴时,绕组端子上产生的电压。但为什么仅通过检测(?)该感应电压就能知道转子的位置呢?
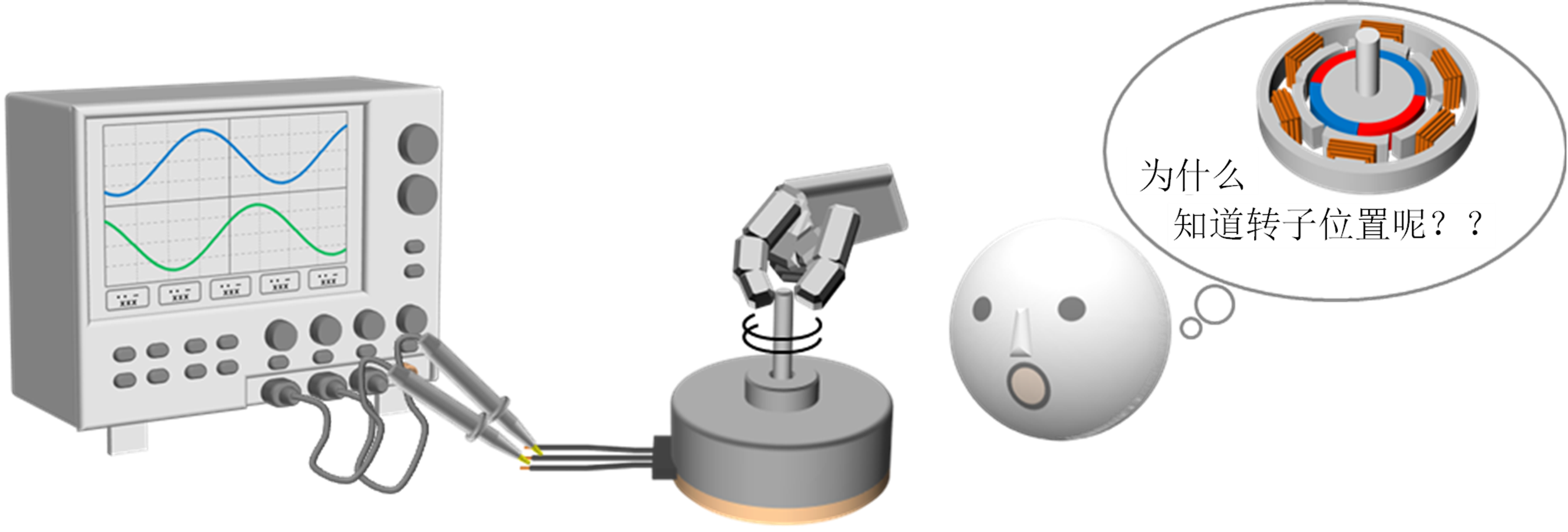
实际上,有些无刷电机的电机驱动器配备了无传感器控制功能,无需使用霍尔元件等位置传感器即可使电机旋转。这种无传感器控制有多种方式,其中如本次问题所示,通过感应电压的波形,特别是检测出过零点来估测转子位置的方式被广泛使用。
那么,感应电压与转子位置之间有什么关系呢?这里我们将从感应电压的产生原理入手,解释两者之间的关系。
无刷电机的感应电压
首先,感应电压是由于电磁感应现象而在线圈(绕组)两端产生的电势差。这里的电磁感应是指当通过线圈中的磁通量发生变化时,会在线圈中产生排斥这种变化(保持原磁通量)的磁场方向上,产生电压的现象。例如,如下图(中)所示,当磁体(N极)靠近线圈时,线圈内向右的磁通量会增加。于是,线圈试图产生一个向左的磁场来抑制这种增加。产生左向磁场的电流方向遵循右手定则(如图所示),并在线圈两端产生与该方向对应极性的电压。相反,当磁体远离线圈时,磁通量减少,所以会产生增加磁通量的电流和电压(下图中的右图)。
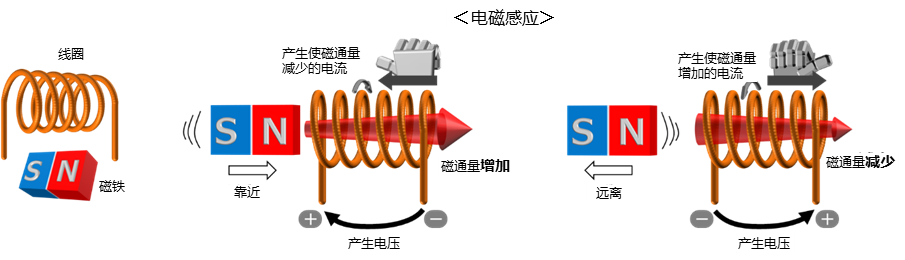
该线圈两端产生的电压大小与磁通量变化的大小成正比。感应电压(\(V_{bemf}\))可以用磁通量的微分来表示(如下式)。公式中线圈匝数\(n\)表示感应电压的大小与匝数成正比。如果N极为正极,且电压的参照物为图中线圈的左侧端子,则公式中的磁通量\(Φ\)为负值。

如果将这种感应电压的产生现象转化为电机的工作,就会如下图所示。下图是由永磁体组成的转子在定子内部旋转时,穿过定子的磁通量变化示意图。
图中标出了来自永磁体N极的磁通量进入S极的路径。在下图中“1”的转子位置处,线圈A的齿槽(见下图中缠有导线的磁性体部分)与S极相对,磁通沿S极方向穿过。当转子从那里继续左转时(图中的“2”),齿槽A的前端部分开始与N极相对,与S极相对的面积减少,所以穿过线圈的磁通量减少。随着转子进一步旋转,如图中的“3”所示,穿过线圈的磁通量变为零(尽管图中未显示,但随着转子进一步旋转,从N极出来的磁通量会不断增加)。

可见,对于电机来说,与其说是永磁体靠近或远离,不如说是与线圈(齿槽)相对的磁体的磁极和磁通密度随着转子旋转而不断变化,从而产生感应电压。
以上即为无刷电机感应电压产生原理的说明。
转子位置和感应电压波形
根据上述感应电压的产生原理,我们来探讨转子位置与感应电压波形之间的关系。首先,让我们解释一下什么是转子位置。
我们说要知道转子的位置,表示位置需要一个参照物。例如地球上的经度或纬度位置是以北极点或天文台为参照物,或者距离100米是以说这句话的人或写有这句话的标志为参照物。那么,转子位置的参照物是什么呢?要理解这一点,我们需要知道为什么要知道转子的位置。
在驱动无刷电机时,之所以要知道转子的位置,简单来说是为了利用该信息来决定在何处产生绕组磁场。无刷电机利用转子的永磁体和绕组磁场之间的引力/斥力来旋转,为了获得这种力,必须知道应该在永磁体的哪个位置产生绕组磁场。因此,转子位置的参照物是绕组。具体来说,转子位置表示的是转子的永磁体与定子绕组之间的相对位置(角度)。
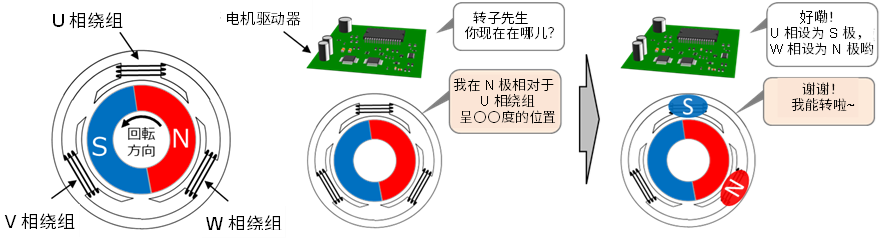
例如,如下图所示,通过将转子的位置理解为“N极相对于U相绕组呈〇〇度的位置”,可以决定在哪个位置产生绕组磁场使转子朝所需方向转动。
(这里的N极指的是N极部分的中心位置。转子位置的表示方式有两种:一种是以磁极的中心位置为参照物,另一种是以磁极切换点(磁极之间)为参照物。后一种情况下,表达为“从S极变为N极的位置相对于U相绕组呈〇〇度”。另外,“相对于U相绕组”是指缠有U相绕组的齿槽的中心位置。)
既然我们已经知道转子位置的参照物是绕组,接下来就要考虑转子位置和感应电压波形之间的关系。
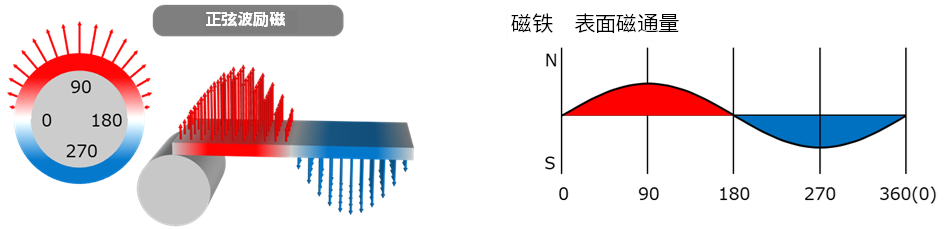
首先在考虑感应电压波形之前要先确定磁通量(\(Φ\)),因此我们假设转子的励磁波形(永磁体的磁通分布)是下图所示的波形。这种波形通常被称为正弦波励磁波形,励磁后的磁通密度呈正弦波分布。
下图为当转子相对于绕组旋转一周时,穿过绕组(齿槽)的磁通量变化情况,以及感应电压的变化情况(再次强调,转子位置的参照物是绕组(这里是与定子的位置关系))。为了更直观地看到穿过齿槽的磁通量,图中还给出了转子处于位置1到5时穿过齿槽的磁通量。
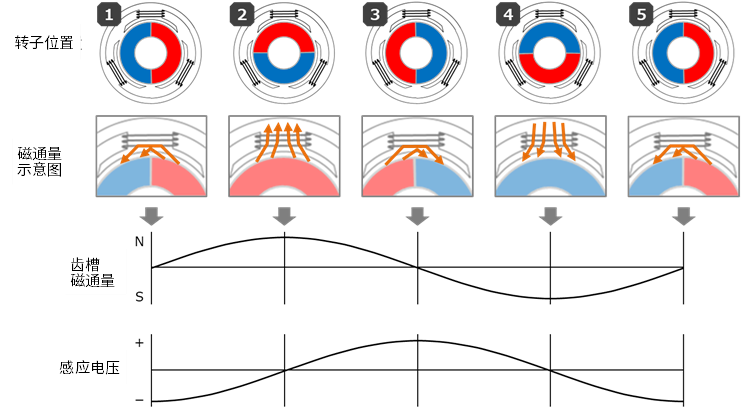
当转子处于位置“1”时,齿槽同时面向磁体的N极和S极,因此几乎没有磁通量穿过齿槽,齿槽的磁通量为零。当转子左转到位置“2”时,面向齿槽的磁体N极面积逐渐增大。由于磁体的励磁波形是正弦波,此时齿槽中的磁通量呈正弦波增长,并在位置“2”达到最大,到位置“3”时又变为零。接着,转子继续左转到位置“4”,磁通量(朝向S极)达到最大,到位置“5”时又变为零(回到位置“1”)。
通过转子的这种运动,产生了如图所示的感应电压(感应电压是齿槽中的磁通量变化量(微分)的负值)。
从以上说明可以看出,转子的位置、齿槽中的磁通量、转子旋转时磁通量的变化以及由此产生的感应电压之间的关系是固定不变的。这就是为什么可以通过感应电压知道转子位置(相对于绕组的位置)的原因。
基于这种关系,例如,如果检测到感应电压在由负变正的过零点,就可以知道此时转子相对于绕组(齿槽)的位置是处于位置“2”。同样,在由正转负的过零点时,处于位置“4”。通过这种方式确定转子位置后,可以决定在哪个方向产生绕组磁场。
理论上,也可以推测出其他转子位置。但是,需要克服一些问题,例如感应电压的大小会随着电机转速而变化、永磁体的磁通分布变化会导致感应电压波形变化、以及检测感应电压大小的方法等。另外,使用比较器电路可以比较容易地检测到过零点。
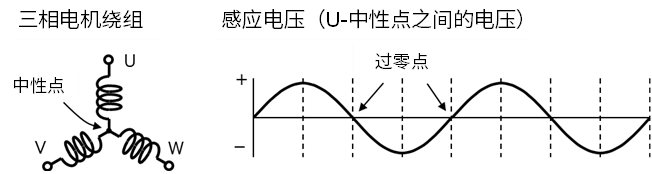
作为转子位置的参考,下图展示了三相星形连接时U相、V相、W相的感应电压及在过零点时的转子位置(转子左转时)。

以上就是对本次疑问“为什么可以通过感应电压知道转子的位置?”的解答。
本文的关键要点
・无刷电机的感应电压是由穿过绕组(齿槽)的磁通量的变化产生的。
・转子位置的参照物是绕组(齿槽)。
・穿过绕组(齿槽)的磁通量由转子的位置决定。
・通过观察感应电压波形,可以知道转子相对于绕组的位置。