什么是无刷电机?
下面我们来了解一下无刷电机。
在上一篇“电机的旋转原理”中我们列举的结构示例中的电机,由于带有电刷而被称为“有刷电机(换向器电机、整流子电机)”。如果用下图中的术语再次介绍一下有刷电机的话,可以说,它是与转子一起旋转的换向器(导电滑环)作为机械开关与电刷反复接触和不接触,从而使转子的磁极自动变化而实现持续旋转的电机。
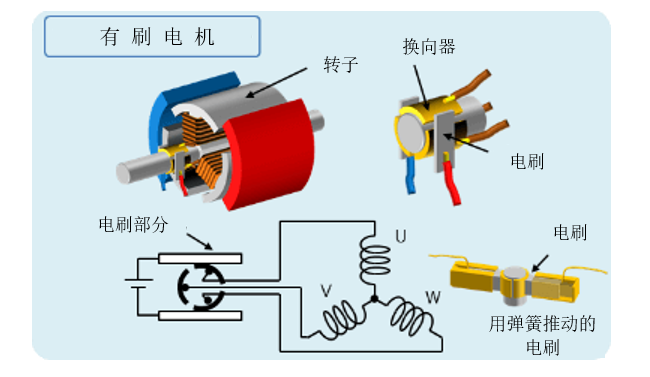
这种电机会自动持续旋转,但从其结构上看,存在电刷与换向器相互摩擦造成磨损而导致寿命短的问题(电刷材质也是开发时需要解决的主要课题之一)。因此,在研究如何提高这种机械开关部分的寿命过程中,无刷电机作为一种全新的开关结构应运而生。
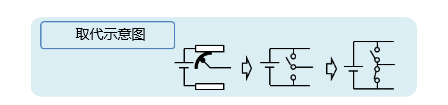
无刷电机的开关部分采用具有实用性的半导体器件——晶体管来执行开关功能。需要使用6个晶体管作为有刷电机的换向器和电刷部分的替代品(三相全波的情况。图中为使用了MOSFET的示例),组成如下电路使电机旋转。
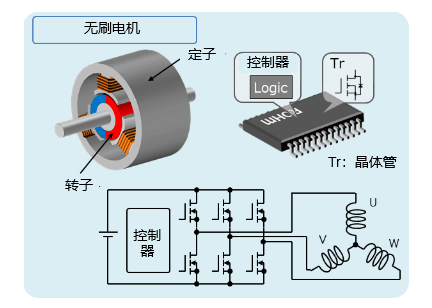
有了这种结构,就需要新的技术。首先,要想用好前面提到的晶体管,必须具备与“开关”相关的技术和晶体管使用相关的知识。另外,在机械开关过程中,是自动切换线路,而晶体管则需要通过信号来控制ON/OFF。随着开关技术的发展,这种开关发展为由被称为“控制器”的集成电路(IC)组成,因此“驱动控制”也逐渐成为一项技术。而且,由于需要通过检测磁体的位置来产生开关的控制信号,因此“磁体位置检测”技术也得以研究和发展。“电机驱动器”正是这些技术的具体体现。
前面我们已经从电子电路的角度介绍了有刷电机和无刷电机之间的差异,这两种电机在机械结构方面也存在差异。在有刷电机中,永磁体是固定的,电磁体是旋转的。之所以采用这种结构,是有其原因的。假设采用相反的结构,就需要让电刷旋转,那么与其相连的导线就会被扭曲,因此,通常采用让电磁体旋转的方式。
而无刷电机的结构则相反。由于绕组保持与电路相连的状态,无法让电磁体旋转,所以,电磁体成为定子,永磁体成为转子。
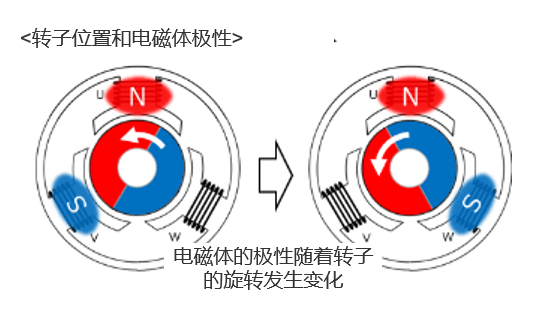
综上所述,可以说从结构方面看,无刷电机是用晶体管来切换电磁体的磁极,使由永磁体组成的转子转动的,由控制器根据转子的位置信息生成电磁体的切换信号。
对于这样的无刷电机,当您实际尝试控制或设计电机时,可能会被一些不熟悉的概念和零部件名称弄糊涂。
因此,我在这里简要介绍一下“极数和槽数”、“机械角度和电角度”、“霍尔器件(霍尔IC)”等设计时所需的基础知识。
什么是电机的极数和槽数?
下面为您介绍表示电机特点的术语——极数和槽数以及相关的机械角度和电角度。
电机可用诸如“极数”、“槽数”这类数值来表示电机的特点。极数是指转子的磁极数。严密地讲,槽数是指下图中“凹槽”的空间数量,但在集中绕组电机中,如图所示,是在每个齿上分别缠绕一组线圈,因此其槽数与线圈数相同。顺便提一下,虽然在下图中没有显示,不过还有一种被称为“分布绕组”的跨多个齿绕线的方式。
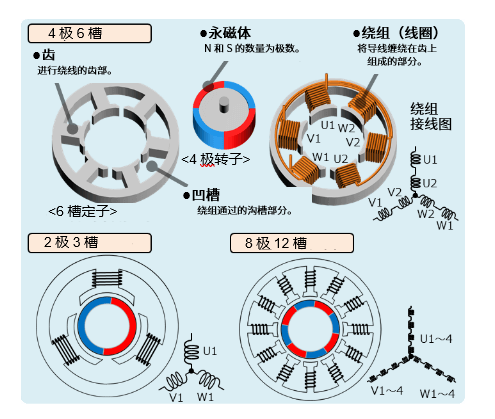
在介绍三相电机的概念等基础知识时,多使用2极3槽图来讲解一对N极和S极、以及被称为“U相”、“V相”和“W相”的三个绕组(绕组有时也被称为“A相”、“B相”和“C相”)。不过实际上很多电机是将这种2:3的结构加倍后变为4极6槽、6极9槽、8极……等结构使用。也有8极9槽、10极12槽等非2:3结构的电机。
这些极数和槽数的不同组合,各有其优缺点,因此各电机制造商会根据电机的用途来决定具体结构组合。在设计电机驱动器之前,必须先了解目标电机的具体结构。
什么是电机的机械角度和电角度?
现在,由前述的极数差异而产生了机械角度和电角度(电周期)的概念。见文知意,“机械角度”就是电机旋转一圈的空间几何角度。转子轴从某个位置开始旋转并返回到原位置的角度是360度。而电角度则是将对绕组(线圈)施加电压的开关的一个切换周期视为360度(后续会具体介绍)。
再稍微提一下,如果是2极3槽的电机,那么其机械角度和电角度是一致的(参见下图)。而如果是4极6槽,则其机械角度是360度,其电角度是两个周期(也可以表达为“当机械角度为180度时,电角度达到360度”,或者说“在一个电周期内转子只转半圈”)。
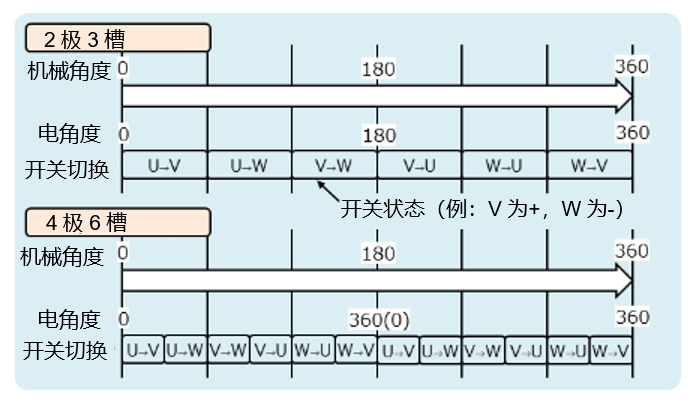
需要记住机械角度和电角度在表达上的区别。例如,电机的转速多用单位r/min表示(表示每分钟旋转了多少圈,有时也用rotations per minute的缩写rpm来表示,有时也写作min-1。另外,r有时也表示round、roll、revolutions的缩写),另外,也用角度来表示转子的位置和位置检测器的位置,这些都是基于机械角度的表达。另一方面,电机驱动器输出的电信号则是基于电角度的,因为电信号源于开关一个切换周期的反复。
通过上图这样的“开关切换”图可能很难理解电角度是否重要,但是随着无刷电机驱动技术的发展,角度的概念已经变得非常重要,所以请大家清楚地了解这些概念以及它们之间的关系。
无刷电机中的霍尔器件(霍尔IC)
无刷电机的驱动需要进行位置检测,有一种方法是使用霍尔器件(霍尔IC)。
电机需要根据转子的位置改变电磁体的磁极。在有刷电机中,由电刷和换向器担负着这个作用,但在没有电刷和换向器的无刷电机中,需要有能够替代它们的功能。在这里,简要介绍一下霍尔器件,它是检测转子位置的手段之一。
霍尔器件是利用了霍尔效应(Hall博士发现)的磁性检测器件。霍尔效应是当施加与流过物体的电流垂直的磁场时,电子由于洛伦兹力而偏转,在垂直于电流和磁场的方向上出现电动势的现象。目前,InSb(锑化铟)、GaAs(砷化镓)和Si(硅)等材料由于具有良好的特性,而被用作霍尔元件的材料。
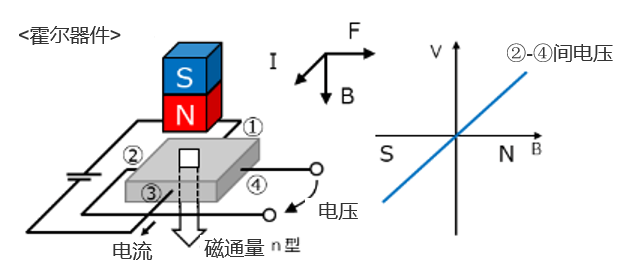
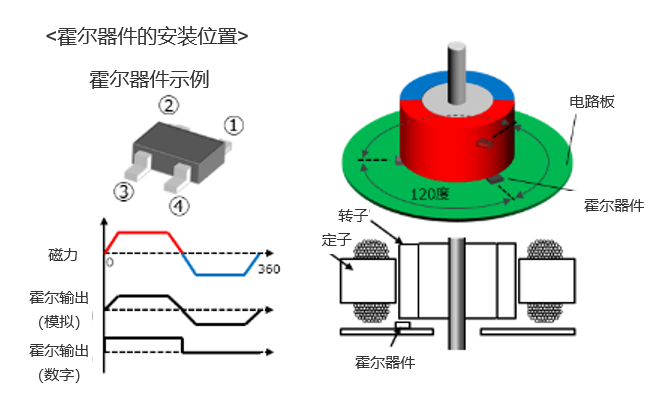
在霍尔器件的引脚处产生的电动势与磁通密度和电流大小大致成正比,另外,如果磁体的极性发生变化,那么电流极性也会发生变化。因此,通过测量霍尔器件产生的电压,就可以确定磁体的极性,并能够根据霍尔器件的位置来检测转子的位置。霍尔器件的输出信号除了与磁力大小成正比的模拟输出信号外,还有数字化的信号。
在电机中使用时,需要将霍尔器件安装在电路板上可以检测转子磁极的位置。假设每60度电角度改变一次开关模式,那么按照电角度计算,需要以120度电角度间隔安装总共3枚霍尔器件。如果每隔120度放置1枚霍尔器件,那么可以通过3枚器件的信号判定六个位置,也就是每60度的转子位置(后面会详细介绍)。
最近出现了不使用霍尔器件的驱动方法“无传感器驱动”,还有使用1枚霍尔器件的方法,请大家找机会了解一下,另外,作为电机位置检测的基础知识,还需要学习一下霍尔元件的特性(电气特性、温度特性等)。
下一篇将为您介绍无刷电机的结构示例。
本文的关键要点
・极数是指转子的磁极数。
・严密地讲,槽数表示“凹槽”的空间数量。在集中绕组电机中,槽数与线圈数相同。
・以三相电机为例,由于其具有一对N和S极,以及“U相”、“V相”和“W相”三个绕组,所以被称为“两极三槽”电机。
・机械角度为电机旋转一圈的空间几何角度,旋转一圈为360度。
・电角度将开关的一个切换周期定义为360度。
・2极3槽电机的机械角度和电角度相同,4极6槽电机当机械角度为360度时,其电角度为2个周期的角度。
・机械角度和电角度的概念是电机驱动的关键要点,需要了解清楚。
・在无刷电机的驱动技术中,霍尔器件是用来检测转子位置的手段之一。
・通过测量霍尔器件产生的电压,可以判定磁体的极性并检测出转子的位置。