
从本文开始,我们将分以下10个主题来介绍对电机的静音效果有很大影响的输出转矩脉动以及转矩脉动小的正弦波驱动。第一个主题是电机的转矩脉动。
第7集目录
无刷电机:什么是转矩脉动?
我们在之前的几篇文章中探讨了电机的输出转矩,在这里我们先稍微总结一下输出转矩相关的知识。到目前为止我们使用的“输出转矩”这一术语,主要有两种含义。一种是在涉及到S-T特性的文章中提到的输出转矩,是指电机在使负载体旋转时所需的“平均转矩”。另一种是下列公式中出现的输出转矩,即“瞬时转矩”。“平均转矩”通常在探讨电机可以旋转的负载范围和电机效率时使用。“瞬时转矩”是在探讨电机的振动和噪声时需要考虑的概念。
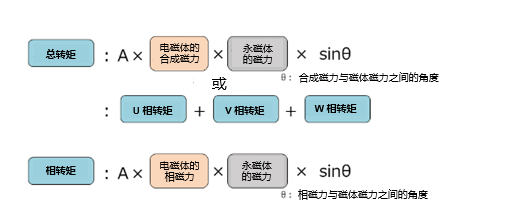
如上面的公式所示,瞬时转矩等于“sinθ”与“电磁体磁力大小”的乘积。也就是说,如果这些因素不稳定,转矩就会发生脉动。这种现象称为“转矩脉动”。转矩脉动对电机的主要性能之一“静音效果”有很大影响。首先,我们以120度驱动为例来具体了解一下转矩脉动。
公式中输出转矩(总转矩)中的电磁体磁力表示三相绕组产生的磁力的矢量合成磁力。在之前的文章中,我们提到过输出转矩是由两种磁力产生的,即电磁体的合成磁力和永磁体的磁力。另一种思路是计算三相合成磁力之前的每一相的转矩,并将它们相加得到总转矩,也可以使用这种计算方法。
相转矩的公式与总转矩的公式相同,但电磁体的磁力仅计算该相的磁力。下图中给出了120度驱动时的相转矩。绕组的相磁力方向始终与线圈方向一致,大小随电流波形的变化而变化。由于方向恒定,所以与永磁体磁力之间的角度设为只考虑转子角度的θ(在总转矩的情况下,需要将合成磁力与转子角度的相对差设为θ)。受这个θ和电流大小(=电磁体的磁力)的影响,相转矩的波形呈现出下图中“转矩(U相)”所示的波形。
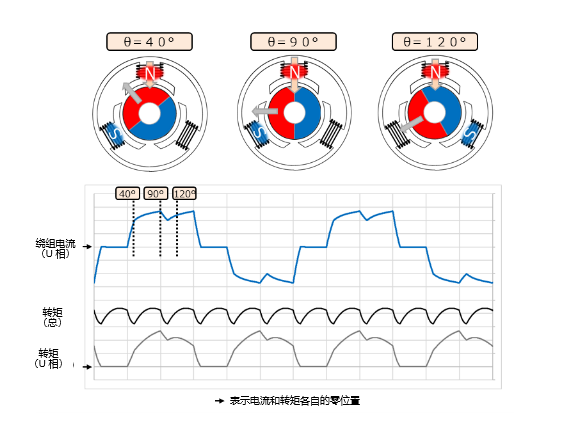
分别对U、V、W相共三相进行该计算,合计转矩即为总转矩。从上图中“转矩(总)”的波形可以看出,120度驱动时,在一个通电周期内有6次较大的脉动。
120度驱动因其算法简单、电机效率特性较好而被广泛采用,但正如这里的转矩脉动所体现出来的,120度驱动是三相无刷电机的驱动方式中静音效果最差的一种。
从这个角度看,在很重视低噪声的应用中,会考虑使用其他驱动方式。在下一主题中,将为大家介绍驱动方式。
本主题的关键要点
・到目前为止所使用的“输出转矩”这一术语,主要有“平均转矩”和“瞬时转矩”两种含义。
・“平均转矩”通常在探讨电机可以旋转的负载范围和电机效率时使用。
・“瞬时转矩”是在探讨电机的振动和噪声时需要考虑的概念。
・瞬时转矩可能会以脉动方式波动,将这种现象称为“转矩脉动”。
・120度驱动因其良好的可控性和效率而被广泛使用,但因其在一个通电周期内有6次较大的脉动而被认为是静音效果差的驱动方式。
无刷电机:什么是正弦波驱动(正弦波激励)?
为了便于大家了解转矩脉动小的驱动方式,我们使用下图再次讲解一下转矩脉动的发生原理。

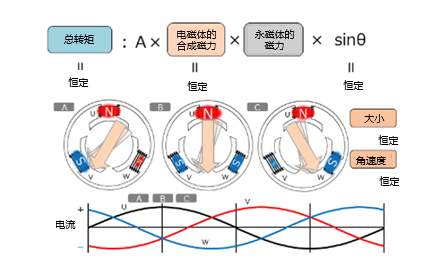
在120度驱动的情况下,绕组产生的电磁体合成磁场不仅大小有脉动,其角速度也有脉动。例如在图中的A区域,绕组磁场只在U相和V相产生,所以角速度为零。由于电流值会变化,所以大小也会发生变化。在B区域,V相磁场减弱,W相磁场开始增强。此时,磁场旋转速度快,磁场强度偏弱。在C区域中,角速度仍为零,只有大小发生变化。由于电磁体的磁场像这样在速度和大小上存在脉动并不断变化,所以总转矩也发生脉动。
那么,怎样才能抑制这种转矩脉动呢?答案是只要保持电磁体的磁场大小恒定和角速度恒定即可。只要角速度恒定,那么与转子之间的角度关系也是恒定的,sinθ将是恒定值(假设转子恒速旋转)。这样的磁场可以通过使绕组电流为正弦波来实现。当角度互差120度的正弦电流通过U、V、W三相线圈时,电磁体的合成磁力就会变成大小恒定、角速度恒定的旋转磁场(参见下图)。
要使绕组电流成为正弦波,施加的电压也需要是正弦波状的。在电机驱动器中,这种正弦波状的电压是通过PWM控制来实现的。在之前的文章“脉冲状的施加电压”中,提到“为了改变施加电压的大小”而实施的PWM控制,还可以通过在一个通电周期内改变每个预定角度的Duty值来形成正弦波状电压。使驱动波形呈正弦波状的驱动方式称为“正弦波驱动(正弦波激励)”(后续这两种说法将按照同义使用,不做特别区分)。
本文的关键要点
・在120度驱动时,电磁体的磁场在速度和大小上均存在脉动并不断变化,因此总转矩也会发生脉动。
・要想抑制转矩脉动,只要使电磁体磁场的大小恒定且角速度恒定即可。
・这样的磁场可以通过PWM控制使驱动波形为正弦波状来实现,这种驱动方式称为“正弦波驱动(正弦波激励)。
无刷电机:正弦波驱动的波形
可以通过PWM控制来施加正弦波状的电压。这里的PWM控制与120度驱动存在不同之处,我们通过下图来具体了解一下。
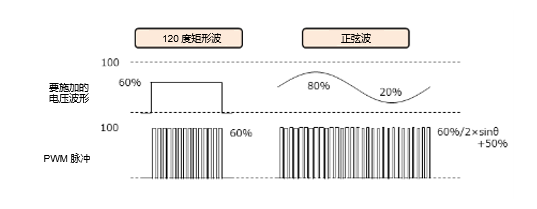
在120度驱动时,PWM脉冲的宽度根据要施加的电压值而保持恒定。例如,如果指令占空比为60%,那么PWM脉冲在整个区域内为60%。
而在正弦波驱动中,会反应与电角度对应的正弦波值。但是,由于正弦波驱动的驱动波形有多种(后续会介绍),因此在这里请作为其中一个示例来理解相关内容。
例如,如果指令占空比为60%,那么正弦波的振幅将为30%。在上图中,波形是最大占空比为80%、最小占空比为20%,最大和最小之间的宽度为60%。如果从这里减小指令占空比的值,那么示意图将呈现上下两边的占空比都接近50%的状态。用公式表示为:Duty指令/2×sinθ+50 [%]。另外,虽然图中未显示,但还一些波形是通过使最小占空比恒定为0%而创建的。用公式表示这种情况的话,公式为:Duty指令/2×(sinθ+1) [%]。
当使用示波器观测施加这样的PWM脉冲后的电信号情况时,将能看到下图所示的波形。
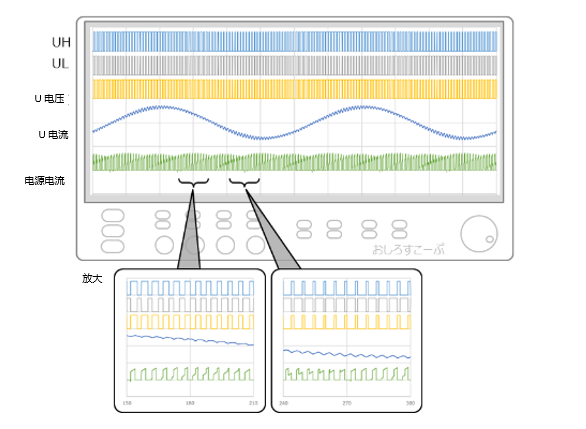
该波形与120度驱动(参考:“无刷电机驱动的实际信号波形”相比大概有两个不同之处。
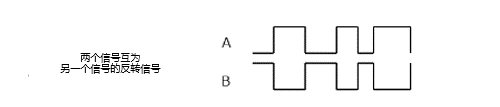
・UL也是PWM脉冲,波形看起来像是UH的反转波形。
・电源电流的峰值看起来像层叠的山峰。放大后,电源电流的波形呈凹凸状。
后续会详细介绍它们的原因。
■<“占空比(Duty)的两种含义”>
在本系列文章中,“占空比(Duty)”这个术语出现了很多次,该术语主要表示两种含义。一种是作为从外部输入的施加电压指令而使用的占空比(Duty)。表示要施加的电压大小(从最大100%到最小0%)。另一种是每个实际PWM脉冲的占空比(Duty)。在120度驱动时,这个“占空比(Duty)”的含义基本相同,但在正弦波驱动时则含义不同,其具体含义会因使用环境而异,这一点需要了解。
本文的关键要点
・可以通过PWM控制来施加正弦波状的电压,但该PWM控制与120度驱动时的PWM有所不同。
・120度驱动时,PWM脉冲的宽度会根据所施加的电压值而保持恒定。
・而正弦波驱动则会反映与电角度对应的正弦波值。
无刷电机:同步整流(高低边PWM)
正如之前提到的“UL看起来像是UH的PWM脉冲反转”,在电机驱动器中,针对高边晶体管的栅极信号Hi/Lo(ON/OFF),有时候需要使低边晶体管的信号成为互补的Hi或Lo。这是使绕组引脚的电位保持Hi或Lo不变的重要操作。
关于绕组引脚的电位恒定,在介绍120度驱动时略有涉及。这是因为,出于稍后将提到的原因,在120度驱动中,很少进行这种互补PWM脉冲操作。然而,在正弦波驱动时,“绕组引脚电压要符合控制器的预期(=恒电位)”这一点更重要,因此需要进行互补操作。
为了说明互补PWM的效果,我们先用下图(单边PWM)来介绍试图通过高边晶体管的ON/OFF(而不是互补)来调整绕组引脚电压时的情况。如图左侧所示,当高边晶体管处于导通状态时,绕组引脚电压变为Hi。要注意此时的绕组电流方向。如前所述,在正弦波驱动中,绕组电流在这种状态下既可能是正的也可能是负的。
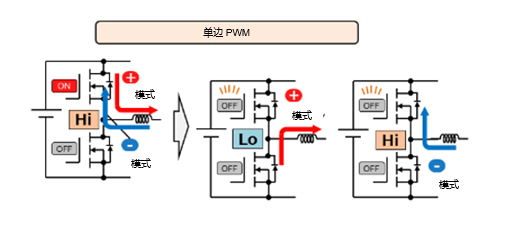
在这里我们假设高边晶体管处于关断状态。此时,只要绕组电流为正向,绕组引脚电压就会通过低边二极管变为Lo,因此电位符合预期。但是,如果电流为负向,则绕组引脚电压仍然为Hi,导致与控制器输出的PWM脉宽(占空比的值)不一致。这意味着正弦波驱动时会产生正弦波形紊乱的情况。
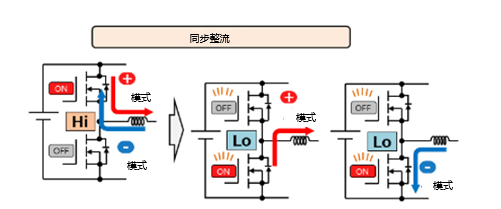
要消除造成此类波形紊乱的因素,就需要进行互补PWM操作。如下图(同步整流)所示,只要在高边晶体管关断的状态下使低边晶体管导通,那么无论电流的流向如何,绕组引脚都为Lo。这样,通过互补PWM操作,可以施加控制器预期的电压,比如希望绕组引脚电压为Hi时就为Hi,希望为Lo时就为Lo。这种PWM脉冲控制方式称为“同步整流”、“互补PWM”、“高低边PWM”等。
顺便提一下,虽然我们在这里不会详细讲解,但是在将PWM脉冲作为同步整流方式来保持绕组引脚电位恒定时,也有弊端(*)。120度驱动时,高边晶体管导通时的电流方向为正,因此基本可以施加预期的电压,但在某些情况下,权衡其弊端后可能使用单边PWM的方式更好。如上所述,对于控制开发而言,选择适合目的和用途的PWM方式是非常重要的。(*再生电流的影响、制动现象等)
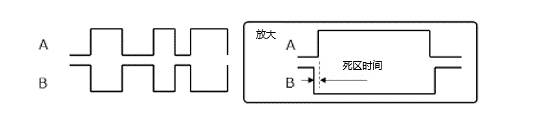
另外,实际的栅极信号并不完全互补,在Hi和Lo切换的时间点,存在高边和低边栅极信号均为Lo的部分。这个Lo的时间称为“死区时间”。这是为了避免高低边晶体管同时处于导通状态时引发的直通电流问题。
本文的关键要点
・与120度驱动相比,正弦波驱动之所以出现“UL的PWM脉冲像UH脉冲波形的反转波形”,是因为正弦波驱动的互补PWM。
・正弦波驱动的互补PWM驱动被称为“同步整流”、“互补PWM”、“高低边PWM”等。
・由于可以通过这种驱动方法使绕组引脚的电位保持恒定,因此通过正弦波驱动可以实现预期的控制。
・同步整流驱动有利有弊,需要了解优缺点之后再考虑使用哪一种驱动方式。
无刷电机:正弦波驱动的电源电流
在“电源电流”一文中,提到过电源电流会根据功率晶体管的ON/OFF状态而流动。在正弦波驱动时,这种ON/OFF状态要比120度驱动时复杂,所以会呈现下图所示的波形。
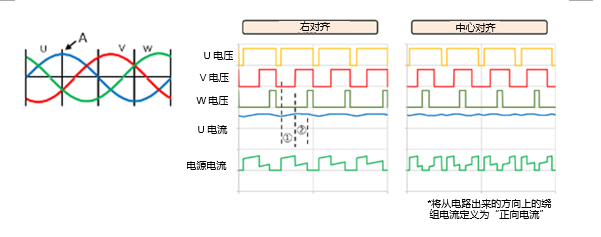
本图中的PWM脉冲波形是将一个通电周期中的A点附近(左图)放大后的波形图。下面我们以中间图所示的①、②时间点的波形为例进行讲解。
首先,在①中,U电压为Hi,V电压为Lo,W电压为Lo。因此,流过绕组的电流沿着下面电路图所示的路径流动。从图中可以看出,此时从电源流出的电流经过U相绕组并分流到V相和W相,然后汇合并返回电源。因此,①处的电源电流波形与U相电流波形相同。
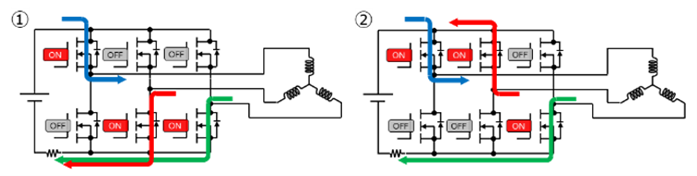
接下来,在②处,V电压变为Hi,U电压变为Hi,V电压变为Hi,W电压变为Lo。与①时不同的是V相电流会流过高边晶体管。因此,流过电源的电流就相当于W相电流。但是需要注意的是,这里的极性是相反的。因此,②处的电源电流波形是W相电流极性反转后的波形。由于在①处和②处都可以看见绕组电流的波形,因此电源电流的波形看起来像层叠的山峰。
这种由晶体管的ON/OFF引起的电源电流波形变化应用广泛,因此好好理解这里介绍的概念是非常重要的。
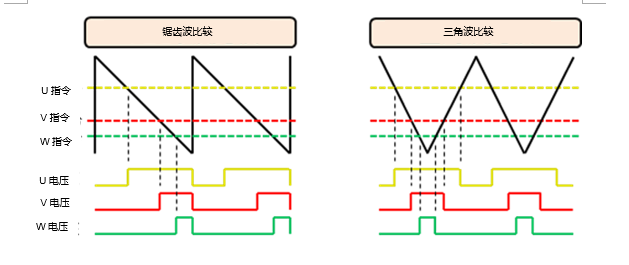
还有,在120度驱动的情况下,在某个时间点只有一相被PWM控制,而在正弦波驱动的情况下,U、V、W三相都被PWM控制(某些驱动波形可能只有两相)。在这种情况下,各自的PWM脉冲位置关系均被纳入应该控制的项目。具体而言,如第一张图所示,有关断时间点位置关系右对齐的PWM脉冲,也有Hi(和Lo)区间中心对齐的PWM脉冲。这些PWM脉冲分别被称为“锯齿波比较PWM”、“三角波比较PWM”等(见下图)。每种PWM脉冲都有其各自的特点,具体特点后续另行介绍。
本文的关键要点
・驱动电机时,电源电流的流动情况取决于功率晶体管的ON/OFF状态。
・在正弦波驱动中,这种ON/OFF状态比120度驱动时更复杂,所以波形看起来像层叠的山峰。
・在正弦波驱动中,基本上U、V、W三相都被PWM控制,因此需要控制各相PWM脉冲的位置关系。
・具体而言,有OFF时间点右对齐的PWM脉冲,也有Hi(和Lo)区间中心对齐的PWM脉冲,这些脉冲被称为“锯齿波比较PWM”、“三角波比较PWM”等。