在上一篇“三相全波无刷电机的正弦波激励PWM驱动”的介绍中,提到了“超前角控制”这个概念。本文将介绍“超前角控制”具体在三相全波无刷电机中是指怎样的控制。
三相全波无刷电机的驱动:超前角控制
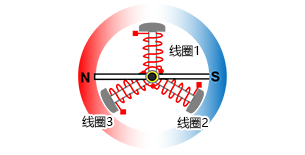
当磁铁(转子)磁场的相位比线圈(绕组)磁场的相位滞后90 度时,可以获得电机的最大转矩。由于相感应电压的相位相对于磁铁(转子)磁场超前90度,相电流与线圈磁场相位相同,因此在相感应电压与相电流的相位相同的条件下,可以获得最大转矩。
然而,如下图所示,当按照与相感应电压相同的相位施加电压(红色),以期相电流(黄色)与相感应电压(蓝色)的相位相同时,受绕组的电感分量影响,相电流(黄色)会产生相位滞后(红色箭头)。相转矩是相感应电压和相电流之积,但相乘后的值会有负值部分(下图左侧波形中灰色带所示期间),在这种负值期间会变为负转矩,效率会下降。

为了改善这种问题并提高效率,可以采取一些校正方法,比如通过使相施加电压的相位超前来使相电流的相位超前,通过使相感应电压的相位与相电流的相位匹配(上图右侧绿色箭头),来消除负转矩期间。这就是“超前角控制”,这种相施加电压的相位超前角度称为“超前角值”。
理想的超前角值会因电机的特性、转速和负载转矩(电流值)而变化,因此需要根据使用状态来设置为适当的值。使用电机驱动器进行超前角控制的主要方法如下:
・固定
・检测相电流的相位,并与转子位置信号的相位进行比较并使之匹配
・根据转速变化
・根据转矩指令值变化
关键要点:
・在三相全波无刷电机驱动的超前角控制中,当磁铁磁场的相位比绕组磁场的相位滞后90 度时,可以获得电机的最大转矩。
・在三相全波无刷电机驱动的超前角控制中,当相感应电压的相位与相电流的相位相同时,即满足上述条件,从而可获得最大转矩。
・在三相全波无刷电机驱动的超前角控制中,如果在与相感应电压相同的相位施加电压,则相电流会出现相位滞后并产生负转矩。
・三相全波无刷电机驱动的超前角控制是一种通过使相施加电压的相位超前以使相电流的相位与相感应电压的相位匹配的方法。