在上一篇“三相全波无刷电机的旋转原理”中,介绍了三相全波无刷电机通过三个线圈中的驱动电流切换实现旋转的原理。接下来将介绍三相全波无刷电机的驱动方法,但在此之前会先介绍三相全波无刷电机的位置检测方法,因为在实际的三相全波无刷电机驱动中,需要检测旋转的永磁体的位置。
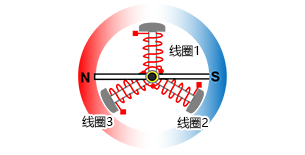
位置检测的方法主要有两种。一种是使用传感器的方法,这种方法需要使用霍尔元件的电压。虽然在上一篇文章中用来说明旋转原理的图中没有直接解释,但是标出了H1、H2和H3霍尔元件(传感器)。另一种是检测各线圈的感应电压的方法,由于这种方法不使用传感器而被称为“无传感器方法”。
使用霍尔元件的位置检测(有传感器)
假设线圈3与线圈1之间的霍尔元件为H1,线圈1与线圈2之间的霍尔元件为H2,线圈2与线圈3之间的霍尔元件为H3,则顺时针方向旋转的电流波形与霍尔元件的信号波形对比如下(中段波形)。
在这个示例中,当对霍尔元件施加N极磁场时产生正(+)电压,当施加S极磁场时产生负(-)电压,并且磁场的强度根据永磁体的旋转位置以正弦波变化(波形图下半部分“霍尔元件电压波形”)。各相的输出电流波形为梯形波(波形图上半部分“电流波形”)。波形图时间轴上的①~⑥的点与上一篇中用来说明“旋转原理”的图中的①~⑥相对应。该图也会在下一节“使用感应电压进行位置检测(无传感器)”中使用。
驱动时,由根据转子位置而变化的霍尔元件输出信号波形合成输出电流波形。合成是由H1电压波形减去H2电压波形,H2电压波形减去H3电压波形,H3电压波形减去H1电压波形。通过这些运算,可以获得相位比H1、H2和H3提前30°的正弦波形(M1、M2、M3)。只要基于这些信号生成输出电流,即可创建用于驱动具有所需相位的电机的电流波形。
要合成用于反转的输出电流信号时,需要从H2中减去H1,从H3中减去H2,从H1中减去H3。也就是说,基于M1=H2-H1、M2=H3-H2、M3=H1-H3,根据M1、M2和M3的组合波形的相位提供输出电流,即可实现反转。
使用感应电压进行位置检测(无传感器)
这是不需要传感器(霍尔元件)的方法,使用的是线圈中产生的感应电压。在三相全波无刷电机中,永磁体相对于线圈旋转,N极和S极交替变化,所以线圈的磁通密度发生变化,线圈自身发电并产生感应电压。当磁极N在线圈端时,进入线圈方向的磁通密度最高;当磁极S在线圈端时,从线圈出来的方向的磁通密度最高。然而,当永磁体的磁化波形为正弦波状时,磁通密度的变化在N极和S极之间的中点处最大。
上图与上一篇“旋转原理”中使用的图片相同,三相全波无刷电机①~⑥的状态对应于下面波形图中的时间轴①~⑥。
下面对三相全波无刷电机①~⑥的状态与感应电压波形之间的关系进行说明。
- ①:线圈1位于S极和N极之间的中点,由于S极产生的磁通从线圈外侧出来的工作变为N极产生的磁通进入线圈的工作,因此磁通密度的变化最大。所以线圈1的感应电压相对于线圈中点是正电压,且最大。
- ②:由于磁通密度的变化比之前略小,因此线圈1的感应电压降低。
- ③:由于通往线圈1的磁通密度的变化进一步变小,因此感应电压也进一步降低。
- ④:由于N极在线圈端,磁通密度的变化变为零,所以线圈1的感应电压变为零。
- ⑤:由于N极逐渐远离线圈1,进入线圈的磁通量逐渐减少,因此感应电压变为负值,磁通量变化小,故感应电压略有下降。
- ⑥:由于通往线圈1的磁通密度的变化进一步变小,因此感应电压也进一步降低。
同样,线圈2和线圈3在从S极切换到N极的中点产生最高的正感应电压,在从N极切换到S极的中点产生最高的负感应电压,当N极和S极位于线圈端时,感应电压变为零。
另外,如波形图所示,各线圈的感应电压波形与其驱动电流波形的相位相同。
通过检测感应电压的零点并合成输出电流波形,可以将感应电压用作转子的位置检测信号,使电机旋转,因此无需使用位置检测用的霍尔元件即可进行控制。
从下一篇开始,将会介绍实际的驱动方法。
关键要点:
・三相全波无刷电机的位置检测方法有两种:三相全波无刷电机使用霍尔元件的方法和三相全波无刷电机不使用霍尔元件而使用电机线圈的感应电压的方法。