上一篇文章中介绍了三相全波无刷电机无传感器专用的两种基本启动方法之一:通过检测同步运行时的感应电压来启动三相全波无刷电机的方法。本文将介绍通过检测永磁体的停止位置来启动三相全波无刷电机的方法。
通过检测同步运行时的感应电压来启动的方法存在的问题
在上一篇文章中提到,“通过检测同步运行时的感应电压来启动的方法”存在一些问题。本文中会介绍的“通过检测永磁体停止位置来启动的方法”是一种可以改善这些问题的方法。为了便于回顾,下面再次列出这些问题:
<通过检测同步运行时的感应电压来启动的方法存在的问题>
・由于生成合成磁场时不考虑永磁体的位置,因此在某些状态下,可能会施加反向转矩,在某些永磁体停止位置,启动时需要时间。
・本来,产生足够转矩的永磁体与合成磁场的位置关系是90度,但由于生产合成磁场时不考虑永磁体的位置,所以会从比如70度或60度等角度开始,所以无法获得固定的较大启动转矩。
无传感器120度驱动的启动方法二:通过检测永磁体停止位置来启动的方法
下面来具体介绍一下能够解决上述问题的“通过检测永磁体停止位置来启动的方法”。
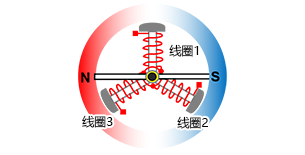
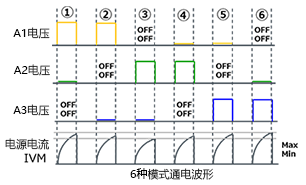
下面对具体的例子进行解释说明。在③中,因为通电而在线圈2产生S极,在线圈3产生N极。永磁体的S极在线圈2的对面,永磁体的N极在线圈3的对面,因此会妨碍线圈产生磁极。因此,电流上升是最慢的,且电流变得最小。
⑥与③相反,因通电而在线圈2产生N极,在线圈3产生S极。由于永磁体的S极在线圈2的对面,永磁体的N极在线圈3的对面,有助于线圈产生磁极。因此,电流的上升是最急剧的,且电流变得最大。
也就是说,通过确认使电流最大或最小的通电模式,可以检测出永磁体的位置。
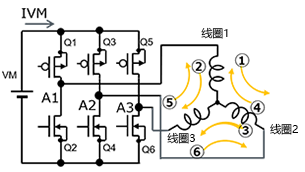
下面使用具体的驱动器电路框图示例和工作波形图来更具体地解释一下。

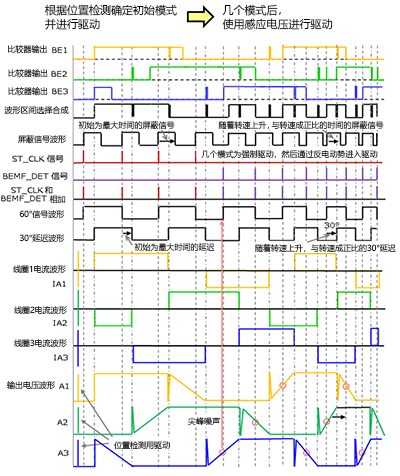
但是,由于这种启动方法从一开始就以大转矩开始旋转,因此仅几个模式(在该波形图中为4个 ST_CLK)即可获得足够的感应电压,并利用感应电压进入稳定驱动状态。也就是说,通过检测感应电压进行启动的方法所存在的问题——启动需要时间得到了改善。
关键要点:
・三相全波无刷电机“通过检测永磁体停止位置来启动的方法”可以避免“通过检测同步运行时的感应电压来启动的方法”所存在的课题——反转和低转矩启动,并改善了启动时间较长的问题。
・在三相全波无刷电机传感器的通过检测永磁体停止位置来启动的方法中,要检测永磁体的停止位置,需要在电机不旋转的短时间内进行6种模式的通电,并确认最大(或最小)电源电流的模式。