继上一篇“三相全波无刷电机的120度激励线性电流驱动”之后,本文将介绍“三相全波无刷电机的正弦波激励PWM驱动”。 在上一篇文章中也提到过,三相全波无刷电机的激励方式有120度激励驱动和正弦波激励驱动两种。相比120度激励驱动,三相全波无刷电机的正弦波激励驱动在控制精度、效率、噪声等方面更具优势,但在系统的复杂性和成本方面,三相全波无刷电机的矩形波驱动更胜一筹。
三相全波无刷电机的驱动: 有传感器、正弦波激励PWM驱动电路示例
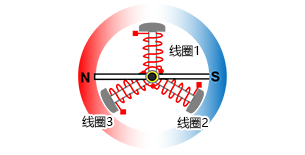
正弦波激励驱动通过由高边和低边开关组成的驱动器所具备的三相控制和驱动电路来实现驱动。以下是带有传感器的正弦波激励PWM驱动的电路框图和各输入输出波形图示例。 其基本工作是将来自三个霍尔传感器的信号输入至霍尔放大器的输入端,经过波形合成的信号通过比较器和三角波转换为PWM信号,由输出段MOSFET来驱动电机的线圈。A1、A2、A3的PWM信号的等效电压为120度相位差的正弦激励波形。120度激励是120度导通60度关断的矩形波激励方法,但正弦波驱动则是180度激励,由于是通过正弦波对零到最大值实施激励,因此工作更平稳,噪声更低。另外,PWM还有助于提高效率。 
三相全波无刷电机的驱动: 有传感器、正弦波激励PWM驱动波形示例
下面使用各波形示例进行详细说明,先来了解正弦波PWM转换。  以前面框图中的H1P/H1N输入通道为例。霍尔放大器的输出H1通过波形合成电路变为图中紫色的正弦波M1。来自M1和三角波振荡器的三角波被输入比较器,作为比较结果,输出具有脉冲宽度的矩形波P1(比较器输出)。P1是通过电平转换和同时导通防止电路来控制输出段MOSFET的栅极,从而驱动电机线圈的PWM输出。这种使用比较器和三角波的PWM转换是很常见的方式,并且是很多电路中使用的方法,比如开关稳压器的PWM生成等。 接下来,请看各输入输出波形。
以前面框图中的H1P/H1N输入通道为例。霍尔放大器的输出H1通过波形合成电路变为图中紫色的正弦波M1。来自M1和三角波振荡器的三角波被输入比较器,作为比较结果,输出具有脉冲宽度的矩形波P1(比较器输出)。P1是通过电平转换和同时导通防止电路来控制输出段MOSFET的栅极,从而驱动电机线圈的PWM输出。这种使用比较器和三角波的PWM转换是很常见的方式,并且是很多电路中使用的方法,比如开关稳压器的PWM生成等。 接下来,请看各输入输出波形。

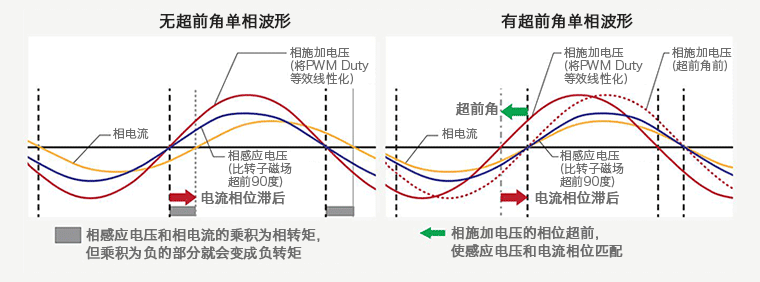
当然,线圈电流是正弦波。通过波形合成电路使相角超前,从而使线圈电流波形的相角总是比霍尔元件电压(H1~H3)超前30度。这一系列的控制称为“超前角控制”。 120度激励时,在线圈电压波形中看到有线圈电流的ON/OFF引起的尖峰噪声,但在正弦波激励驱动时,由于是180度激励,没有ON/OFF,因此不会发生尖峰噪声。 下一篇计划介绍超前角控制的相关内容。
关键要点:
・三相全波无刷电机的正弦波激励PWM驱动是各相位差为120度的正弦波驱动。 ・三相全波无刷电机的正弦波激励PWM驱动由于不会像三相全波无刷电机的120度激励驱动那样产生尖峰噪声而在噪声方面更具优势。 ・三相全波无刷电机的正弦波驱动通过PWM驱动实现高效率。