出场人物介绍

一濑(主角)
新手工程师。从中学起,就立志成为一名工程师,毕业后进入ROHM。一濑废寝忘食地学习电机驱动器相关的知识,对此充满激情。现在只有他可以看见驱动君和小甜心。
二宫
与一濑同期进入ROHM的女孩。成绩优异,经常排名第一。性格强势,但勤奋上进,对一濑也甘拜下风。同时还是Sugiken 秘密的忠实粉丝。
Sugiken
ROHM的超级工程师。平时为人和善,但有时也很热血。对于工程师的工作充满热情和自豪感。过去,Sugiken也可以看见驱动君和小甜心,但现在已经看不见了。
驱动君
电机驱动器精灵,非常喜欢与电机有关的人和熟悉电机的人。暗恋小甜心,时常被迟钝的小甜心捉弄。
小甜心
电机精灵,和驱动君青梅竹马。非常熟悉电机,其知识丰富程度与驱动君相比,有过之而无不及。是一位稳重的大姐姐,但是一旦涉及爱情,就变得迟钝,完全没有察觉到驱动君的想法。
Sugiken老师 简介
在ROHM的电机LSI事业部任技术主干(专家)之职,负责为电机驱动器IC开发提供各种技术方面的建议与指导,也负责开发旨在改善电机特性的新驱动算法,并担任公司内部和外部电机相关培训课程的讲师,还会举办一些电机技术讲座等活动。
电机的驱动状态和保护工作



在实际使用电机时,需要考虑各种各样的状态。例如,电机不仅进行单纯地旋转,还可能用于停止或施加制动转矩等情况。另外,电机也可能在受到外部干扰的情况下旋转,在这种状态下可能需要对电机及电路实施保护工作。
因此,在开发电机驱动器时,不仅需要设计使电机旋转的控制,还必须设计其他状态下的控制工作。
本文我们将介绍与电机驱动器的实际驱动控制相关的内容。
第11集目录
控制状态
电机驱动器除了常规的使电机旋转的工作外,还可以根据用途采取多种控制状态。这里以功率晶体管的完全关断、低边导通(或高边导通)和固定这三种控制状态为例进行说明。
各状态的示意图分别展示了相应控制状态下功率晶体管的导通/关断示例。另外,还提供了电机未旋转时(不旋转)和因惯性等旋转时(旋转中)的绕组电压和绕组电流的示意图,以供参考。

<完全关断>
所有的功率晶体管均处于关断状态,也称为“开路状态、自由运行或Hi-Z(高阻态)”。由于完全关断,因此也可以称之为“非控制状态”。
此时,绕组中无电流流过,因此不会产生转矩,转子处于自由状态。如果转子因惯性或外力旋转,绕组端子会出现感应电压。这种可观测感应电压的状态被应用于无刷电机控制方法之一—无传感器控制等场景中。

<低边导通(或高边导通)>
高边和低边的功率晶体管中,其中一边的功率晶体管全部处于导通状态,也称为“低边短路(或高边短路)”等。
在这种控制状态下,若转子旋转并产生感应电压,电流会流过绕组。该电流会产生与转子旋转方向相反的转矩。因此,这种控制状态有时被称为“短路制动”。想要快速停止旋转中的电机时,相较于完全关断状态,低边导通(或高边导通)能让其更快停止。

<固定>
在任意两相绕组之间施加电压的状态。在下图中,将U相固定为电源电压、W相固定为Gnd,并使电流流过。当然也可能施加在其他绕组之间,也称为“堵转”等。 由于绕组磁场的方向是固定的,因此适用于需要将转子停留在特定位置等场景。

驱动状态
上一节介绍了功率晶体管导通/关断相关的电机控制状态,接下来介绍使用电机驱动器驱动电机时的几种状态。
这里的驱动状态是指在电机驱动器试图转动电机的控制状态下,电机所处的状态。例如,当施加一定电压驱动电机使风扇旋转时,如果受到外部风的影响,电机的状态会因风向和风力大小而变化。这种情况下,主要会出现以下几种状态。
<条件说明>
电机驱动方式为120度方波,PWM控制为同步整流型。
电机正常驱动时风扇的风向为从右到左。
外力通过风向袋的方向和角度表示。

<负载状态>……当没有风等外力或外力较小时
在某一施加电压下,电机在其可输出的转速和转矩范围内旋转的状态,可视为正常负载状态。施加电压和电流的方向相同,流过的电源电流为正。在电机的S-T特性中表现为下图范围的状态。

<空载状态>……外部正向风力与空载转速达到平衡时
通常,空载状态是指电机在没有风扇等负载的情况下旋转的状态,但当存在负载时,若该负载(此处为风扇)是因外力而旋转,也可能呈现同等状态。在这种情况下,电流几乎不流动。在S-T特性中表现为下图中的点。

<再生状态>……外部正向风力大于空载状态时
因外力等影响,在某一施加电压下,电机以超过其可输出的最大转速(空载转速)而旋转的状态。感应电压大于施加电压,电流方向相反(见下图)。这种情况下,电源电流为负,电流流回电源。虽然可视为发电状态,但需注意,如果电源电路是无法吸收电力的结构,可能会导致电路故障。电机转矩为负,并作用于停止旋转的方向。这种再生状态主要发生在同步整流型驱动控制中。在S-T特性中表现为下图范围的状态。

<反转状态>……外部逆向风力大于启动转矩时
电机转矩无法克服逆向外力,导致电机朝与预期相反的方向旋转的状态。感应电压的方向相反(见下图),绕组电流增加以使电机转矩与外力达到平衡。但需注意可能引发超出预期的大电流。在S-T特性中表现为下图范围的状态。

除上述受风力影响的状态外,还有堵转状态(转子因某种外力被固定住而无法旋转的状态)。此时,在S-T特性中表现为转速为零的位置。
下图将每种状态统一展示在一个S-T特性中。

保护工作
接下来介绍保护工作。这里的保护工作是指为避免故障或危险,电机驱动器实施的工作。
导致电机故障的因素有很多。例如,不仅是电机驱动器,电路也可能因电压、电流或温度状态不同而发生故障或异常工作。另外,电机本身是旋转体,高速旋转时离心力可能造成电机等发生损坏。因此,电机驱动器会检测这些状态,并通过保护工作(详情见下表)以防止发生故障等。

关于上述电机驱动器的保护工作,有一点需要注意:它很难对所有异常状态都进行保护。例如,如果施加在控制IC上的电源电压超过其耐压值,则很难通过保护工作避免IC损坏。这种情况下,需要使用齐纳二极管等外置电子器件进行保护。
接下来介绍保护工作的解除。
上表中,电压、温度和结构(高速旋转)的保护通常在相应异常状态消除后解除。在这种保护工作中,会为异常检测阈值设置滞后,以防止频繁地反复实施工作和解除。例如,在90度进行温度保护工作时,解除温度会设为略低于90度的值(85度等)。
过电流保护的解除需要特别设计。若通过上述电路图中所示的分流电阻器两端的电压差检测过电流时,保护工作会使功率晶体管关断,从而导致电流无法流过分流电阻器。这意味着在保护工作期间,无法检测流过绕组的电流值是如何变化的。因此,使用图中所示位置的分流电阻器进行过电流保护工作时,需要在固定时间后或在每个PWM周期解除保护。
此外,还有一些检测霍尔信号的异常或检测到电机未按预期旋转后停止电机驱动控制的工作,这些有时也被视为是异常时的保护工作。
<未按预期旋转的状态示例>
・绕组或铜箔断线(开路检测)
・转子不旋转(堵转检测)
等
保护工作是保障产品安全的重要功能。除本文所述保护工作外,电机驱动器还会按需配备其他合适的保护工作功能。
电平转换
电平转换电路是将来自控制器的栅极指令信号转换为导通/关断功率晶体管时所需电位及电流的电路。如上所述,作为功率晶体管使用的MOSFET是通过栅极引脚电压的变化来实现导通/关断的。这种工作需要合适的电压和充放电电流,但控制器的输出电路通常无法满足该电位或电流供应能力。因此,需要通过电平转换电路来调整供电电平。
根据所连接的高边功率晶体管类型的不同(P沟道和N沟道),电平转换电路主要有如下图所示的两种结构。
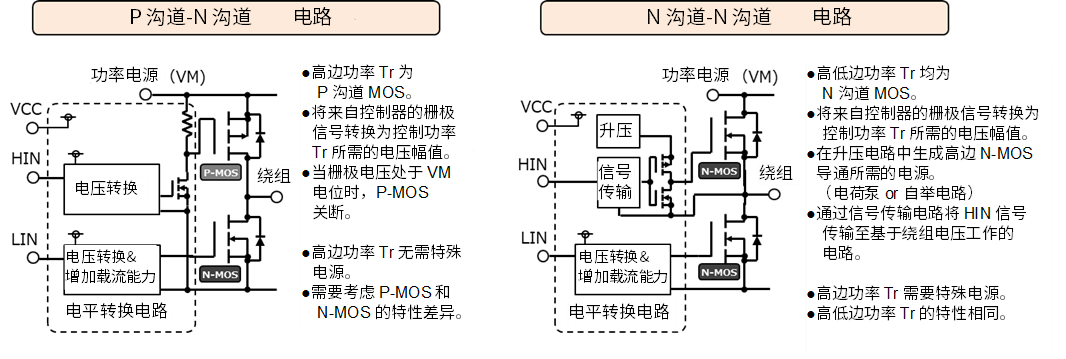
虽然有两种结构,但由于低边功率晶体管均为N沟道,因此低边部分的电平转换电路的功能是相同的。该电路将来自控制器的信号转换为能够使功率晶体管完全导通/关断的电压幅值的信号,同时具备电流供应能力。
两种电路中高边晶体管的电路有很大差异。首先,高边功率晶体管为P沟道MOSFET(P-MOS)时,电平转换电路的输出即栅极信号与VM电压(见上图)处于相同电位时,晶体管关断;当超过阈值并降至较低电位时则导通。该情况下的电路示例如上图所示。当图中P-MOS栅极的低边所连接的晶体管导通时,栅极电位下降,P-MOS导通;当栅极的低边晶体管关断时,通过电阻将栅极电压拉高至VM电位,P-MOS关断。
这种电路的优点是无需产生高于VM电压的电源电压,电平转换电路的结构相对简单。但缺点是功率晶体管中的P-MOS通常比N沟道MOSFET(N-MOS)价格更高,并且高低边晶体管的特性不匹配。
高边晶体管为N-MOS时,需要VM+α的电源来实现高边功率晶体管的导通。该电压通常在电机电路内部通过电荷泵或自举电路等升压电路产生。另外,连接高边N-MOS栅极的电路是以绕组电压为基准的浮地电路,因此需要将上图中的HIN逻辑传递到该浮地电路中的电路。由此可见,高边晶体管为N-MOS时电路结构较为复杂,但优点是高低边功率晶体管可以统一为具有同等特性的N-MOS。
本文的关键要点
・电机不仅会旋转,还有停止和制动状态。另外,也可能受外部某些影响而旋转。因此,电机驱动器的设计不仅需要掌握使电机旋转的技术,还需具备驱动控制相关的知识。
・本文将相关知识分为控制状态、驱动状态和保护工作三部分进行阐述。
・电机驱动器IC具有多种结构,有些配备上述的单一功能模块,有些则集成全部功能模块。
・驱动状态表示在外力作用下变化的电机状态。依据外力方向(正向或逆向)及其大小,电机有四种工作状态:负载状态、空载状态、再生状态以及反转状态。
・保护工作是电机驱动器为防止电机故障或危险运行而实施的工作。保护对象包括电气电路和电机结构体,有电压、电流、温度及转速等保护功能。
・保护工作的解除时机同样需要慎重考量。