第10步:将ESC安装到机臂上
现在,机架的核心已经成型,我们可以开始将各个部件安装到机臂上了。您可以用扎带将每个ESC固定在机臂的下方,如下图所示。

图16:用轧带固定在机架机臂上的ESC
第11步:用螺栓电机安装到机臂上
请将电机安装到每个机臂的末端,电机的旋转方向如下图所示。电机的旋转方向位于电机侧面。比如,请在左后方安装一个逆时针电机,在左前方安装一个顺时针电机。
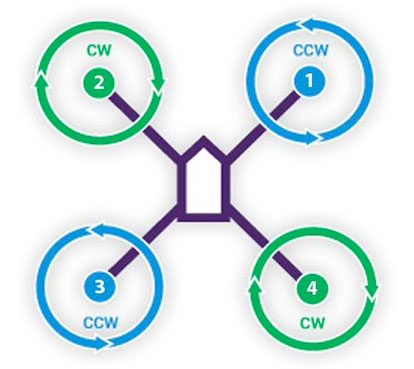
图17:NAZA的电机编号定义 / Ⓒkenstone6.net
第12步:将电机引线连至ESC

图18:三根电机线已连至ESC
请将每个电机的三根引线连至相邻ESC正面的三个孔中。此时,导线的连接顺序无所谓。(如有必要,我们将在第2部分中更正线序)。
第13步:将LED模块连接到飞行控制器和手臂
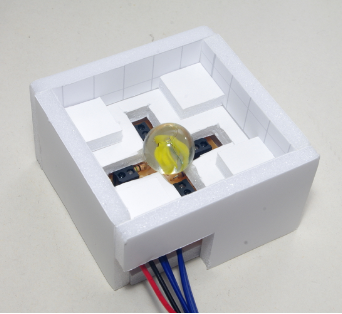
NAZA-M Lite附带的这个小模块集成了LED指示灯(比如电池电量低警告、良好的GPS锁定指示)以及连接PC的USB接口。LED模块如下图所示。将长导线的一端连接到NAZA-M Lite背面标有“LED”的插槽中。我们会在本教程的第2部分用该USB接口配置飞行控制器。我用热熔胶将该模块粘在了左后机臂的侧面。

图19:后机臂上的NAZA-M Lite LED指示模块
第14步:安装GPS
NAZA-M Lite附带的GPS有一个安装杆。将GPS安装在这个安装杆上可以增加电机和ESC与GPS之间的距离,从而减少电磁干扰的可能。GPS杆分为三部分:底座,有四根腿;一根细长杆(紧密连接底座和顶部,连接处有胶水);用来安装GPS的平坦顶部。我把GPS安装杆安装在机架的右后端。GPS线末端的接头与LED模块的接头相同。请将GPS线连至相邻LED模块的“EXP”插槽中。

图20:安装在机架顶部的GPS
第15步:安装Raspberry Pi
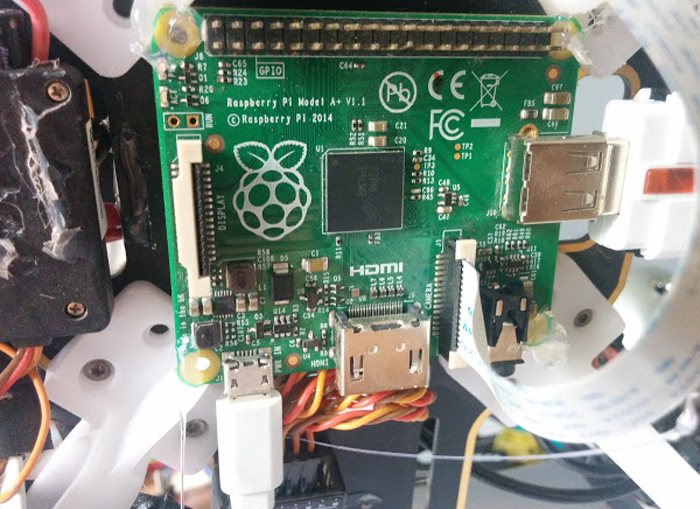
图21:安装在机架底部的Raspberry Pi
我发现安装Raspberry Pi最方便的地方是在支腿与机架连接处之间的底板上(请参见上图)。请将GPIO引脚的方向朝下,并让USB端口对着电池接头。Raspberry Pi无法与底板平坦接触,因此不能用双面胶粘贴。我用热熔胶将四个角固定在支腿上。
第16步:安装稳压器
我们处理四轴飞行器的底部时,可以将稳压器粘在其导线焊接处正下方的底板上。
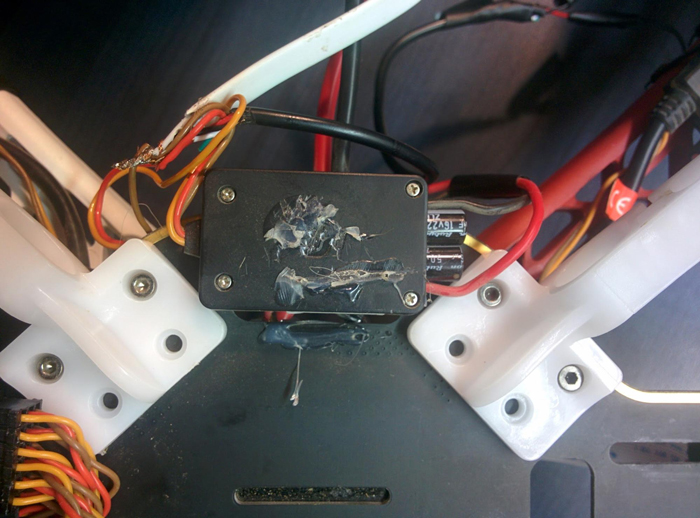
图22:两个白色支腿之间的黑色矩形稳压器
第17步:安装Raspberry Pi相机
由于Raspberry Pi相机的目的是提供四轴飞行器飞行前方的实时视图,因此应将其安装在四轴飞行器的前部。我用热熔胶将一小块纸板粘到两个机臂之间的机架前部,然后再将Raspberry Pi相机粘到纸板上(请参见下图;我的相机带有广角镜头,因此您的相机看起来可能略有不同)。
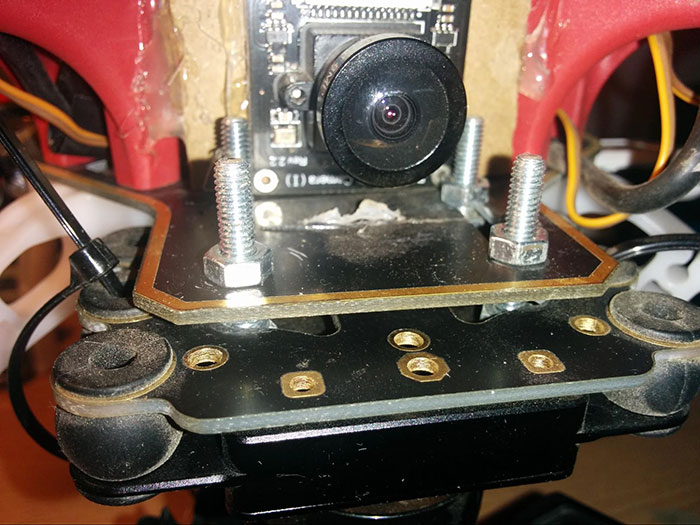
图23:图的上半部分是获取四轴飞行器第一人称视角(FPV)影像的Raspberry Pi相机。图的下半部分是我们即将安装的万向节的顶部。
您的Raspberry Pi相机应该已经自带一根排线。排线的另一端必须连接到四轴飞行器底部的Raspberry Pi。首先将排线滑过纸板的后方,并穿过正下方的孔;然后稍微弯曲排线,让线上的裸露金属朝向USB端口的相反方向。

图24:相机与Raspberry Pi的连接
要将排线连至Raspberry Pi,请轻轻拉开标有CAMERA的黑色接头(HDMI端口和音频输出/复合视频输出端口之间)上的白色盖子。请用力插入排线,以确保线缆均匀插入。抓紧排线,同时用我们先前打开的白色盖子将排线锁定在适当位置。
第18步:用稳压器为飞行控制器和Raspberry Pi供电
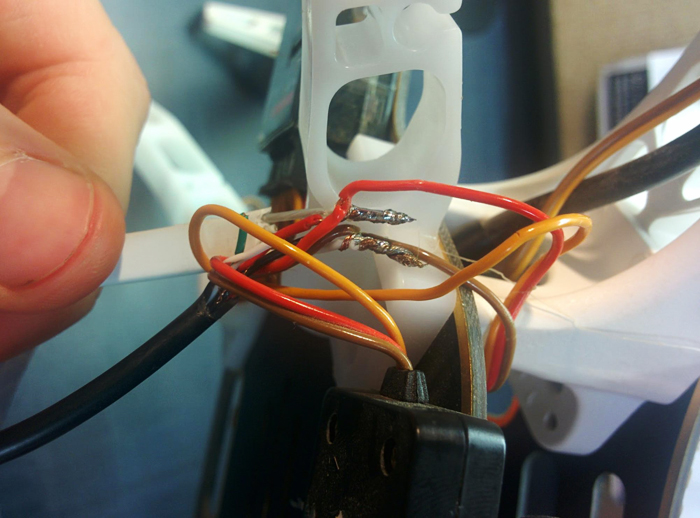
图25:稳压器的棕色和红色导线焊接到Micro USB线的正极和负极导线
我们之前安装的稳压器可提供5V输出,很方便地为飞行控制器供电。我们也可以利用该5V电源为Raspberry Pi供电。为此,我切开来自稳压器的PWM信号线的红色和棕色线,分别将它们焊接到Micro USB线的正极(红色)和负极(黑色/棕色)。请务必将PWM信号线的末端也焊接到该新线束上!否则,您将无法为飞行控制器供电。然后只需将Micro USB数据线插入Raspberry Pi即可为其供电。
要为飞行控制器供电,请将稳压器的PWM信号线连至飞行控制器背面的X3插槽。
第19步:安装防抖万向节

图26:安装橡胶球后的万向节侧视图
万向节通过六个防抖橡胶球连接到四轴飞行器的机架上,这些橡胶球是抵消相机抖动和旋转运动的第一道屏障。要安装橡胶球,您必须先将其装入万向节下部的小孔中,然后将球的顶部装入万向节的顶板中。为了防止万向节在飞行中脱落(比如防抖球碰巧损坏),我在万向节两侧中间的球孔内各绑了一根轧带。这一步完成后,机架的样子应与上图类似。
第20步:用螺栓将万向节固定到机架的前部延伸部分
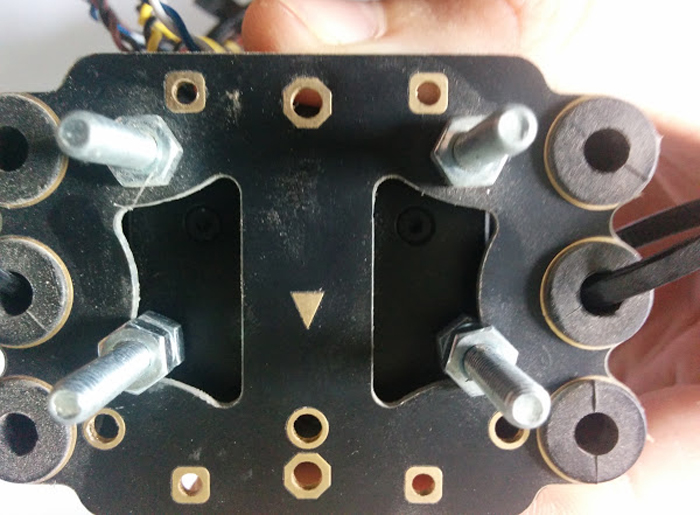
图27:已安装螺栓的万向节顶视图
为了减少在快速转弯时四轴飞行器的支腿进入拍摄画面的可能性,我决定用螺栓将万向节固定到机架的前部延伸部分(如果将万向节安装在机架中心下方的话,那么支腿更容易出现在拍摄画面中)。为此,我将M3螺栓的头部(您也可以使用M4的螺母和螺栓,但是需要将两个后孔的尺寸稍微扩大一点)插入万向节顶板的两个孔内,将另外两个M3螺栓插入宽阔开口的右下角(请参阅上文螺栓的放置位置;请注意,小箭头方向表示万向节的前方)。
然后,我在每个螺栓上安装螺母并拧紧,将其固定在万向节上。要将万向节固定到机架上,我将螺栓滑入机架前部延伸部分的两排开口中,并用螺母将其固定(有关将万向节用螺栓固定到机身前部的外观,请参见下文)。

图28:Raspberry Pi相机和万向节前视图
第21步:制作一根单独的电池接头延长线,并将其焊到万向节电源线上
为了让FeiYu Tech Mini 3D万向节正常工作,必须将其连至电池。我特意制作了一根电池接头延长线,同时剪掉了万向节电源线上的JST接头,然后将电源线焊接到延长线上。该延长线由一个公T型头、一个母T型头和焊在中间的万向节电源线组成。使用延长线之后,我们不必将万向节电源直接焊接到配电板上。这样,运输时可以从机架上卸下万向节,或者可以实现没有万向节情况下的飞行可能。
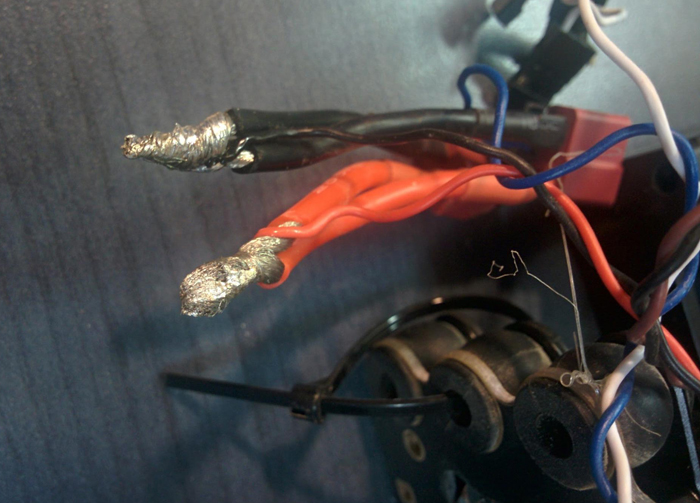
图29:万向节导线(上面的红色和黑色细线)焊接到延长线上的方式
第22步:将相机安装在万向节上

图30:安装在万向节上的Xiaomi Yi相机
此项目中使用的Xiaomi Yi相机比该万向节设计配套的GoPro稍大。但是,如果您先拧入支架的底部螺栓,然后再拧紧顶部,Xiaomi Yi相机仍然可以正常安装,无需对万向节进行任何修改。
第23步:将手机支架安装到发射器上

图31:安装在发射器背面的手机支架
具体手机支架的安装步骤可能会有所不同,对于我的手机支架,我只是用了一块比支架吸盘稍大的带有双面胶的圆盘。我首先用双面胶带将该圆盘牢固地粘在发射器的背面。然后,将吸盘也就是手机支架固定到发射器上。将支架的金属板(手机支架自带)粘到手机外壳上之后,请掰弯支架的柔性机械臂,以便在正常握住发射器的情况下可以看到手机屏幕。手机支架的侧视图请参见上图。
手机支架末端的磁铁通过上述金属板将手机固定在支架上。
第24步:安装发射器电池
只需取下发射器的电池盖,然后将AA电池安装在电池盒中即可。然后,请根据两个引脚附近印制的极性(如下图所示,发射器的电池槽内部视角)将电池盒的小接头插入发射器。
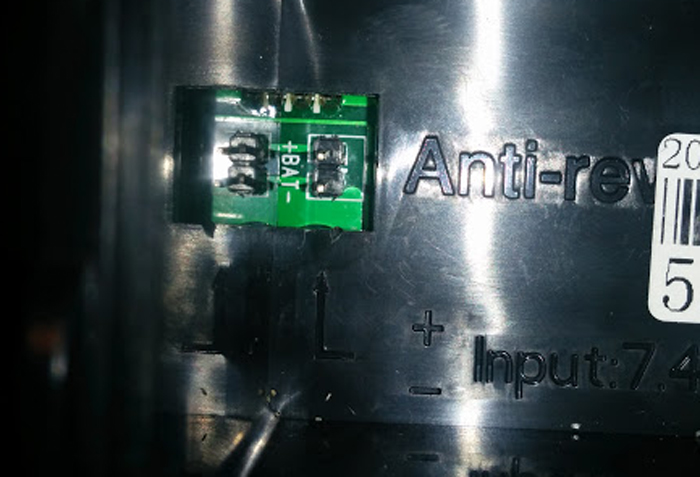
图32:发射器的电池连接器

图33四轴飞行器的侧视图
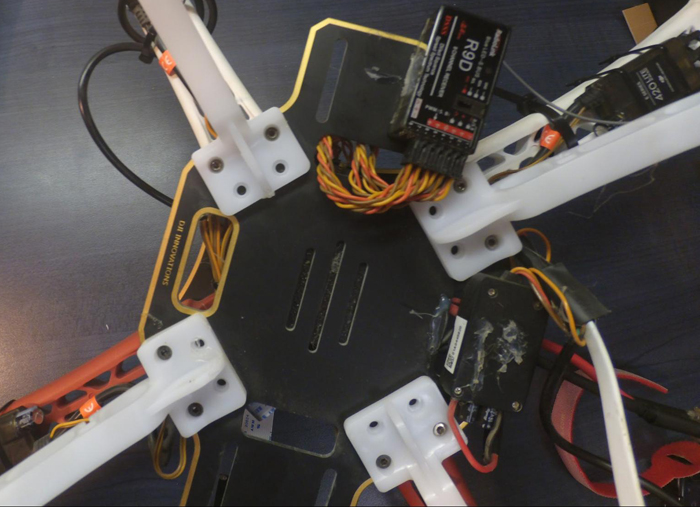
图34:四轴飞行器的底视图(照片中没有Raspberry Pi)
恭喜!您刚刚完成了航拍四轴飞行器的组装。然而,该四轴飞行器目前无法正常飞行。在第2部分和第3部分中,我们将描述如何配置四轴飞行器的软件、学习如何飞行并进行一些飞行测试。我们会在下个月完成该项目的下一阶段。敬请期待!
Brenton Sutherland
Brenton目前就读于滑铁卢大学软件工程专业,拥有多年C++和Python编程经验,并且开发过多个Raspberry Pi和Arduino项目。