伺服电机(英文:servomotor),在机器人、制造设备以及汽车等众多领域有着广泛应用。
初次接触时,其工作原理或许看似复杂。本文将采用循序渐进的方式,系统阐述伺服电机的基本工作原理、构成以及应用。
伺服电机的工作原理
什么是伺服电机?
伺服电机,通常是指一种用于执行位置控制任务的电动机。
它的特点是能够以非常高的精度控制旋转角度和转速,这要归功于伺服电机的特殊控制系统。
下面将阐述伺服电机的基本工作流程。
基本工作流程
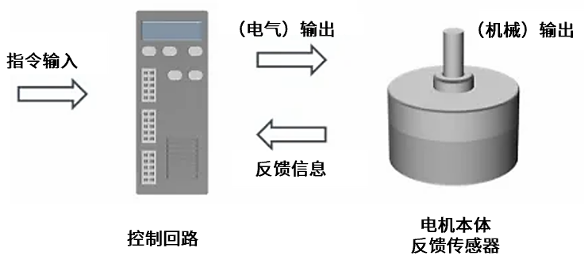
伺服电机的运行依托于 “控制回路” 或 “反馈回路” 系统。
该系统主要涵盖以下四个步骤。
- 1. 指令输入:在该环节,向系统下达“希望执行何种操作”的指令。比如,可以下达指令让电机旋转到特定角度。
- 2.控制:基于输入的指令,由控制算法决定电机如何运行。
- 3.输出:执行控制单元所决定的动作。电机在这一步骤中进行实际的物理运转
- 4.反馈:测量电机的实际位置和速度等参数,判断其是否与指令要求相符。该信息会反馈至下一个控制单元,并根据需要进行调整。
通过这个反馈回路高速且连续的运行,伺服电机得以实现高精度、高响应性运转。
伺服电机的构成
下面对伺服电机的基本构成进行说明。
基本构成
伺服电机主要由以下四个主要部件组成:
- 1.电机本体:作为伺服电机的核心,电机本体承担着将输入电能转化机械运动的重要职责。电机的类型,如直流电机或交流电机,以及其在电能-机械运动转换过程中的特性(转矩、速度等),均会对伺服电机最终的控制性能产生重大影响。
- 2.反馈传感器:反馈传感器用于检测电机当前的位置和速度。这些信息用来对系统预期运行状态与电机实际运行状态进行比较。反馈传感器有光电编码器、旋转变压器等不同种类的产品。
- 3.控制电路:控制电路负责在电机本体和反馈传感器之间进行信息交互,并生成控制指令,为电机提供适配的电力驱动。该部分决定了电机控制的精度和响应性。
- 4.电源:电源负责为电机运行提供所需的电力。伺服电机通常对高精度控制有严格要求,而电源的品质和稳定性是非常关键的因素。
伺服电机由这些支撑其高精度控制性能的要素构成。电机本体、反馈传感器、控制电路和电源这四个部分协同工作,使伺服电机能够发挥其卓越的性能。深入了解这些构成要素的特性和功能,对于更高效地设计和应用伺服电机控制系统具有重要意义。
伺服电机的应用
伺服电机凭借其精确的控制功能和卓越性能,被广泛应用于众多产业领域。
下面将介绍伺服电机的部分典型应用场景。
工业生产与自动化
大多数工业机械通常对运行的精准度和可靠性有非常高的要求,而伺服电机因其精确的定位能力和高转矩,在其中发挥着重要作用。
以数控机床(Computer Numerical Control,CNC)为例,伺服电机能够将切削工具准确移动至目标位置,进而实现复杂精密形状的加工。
机器人技术
机器人技术高度依赖于伺服电机。在工业机器人、自动驾驶汽车、无人机以及机器人手术设备等诸多应用场景中,伺服电机的精确控制发挥着不可或缺的作用。

控制方法与控制电路
伺服电机的控制方法包括位置控制、速度控制和转矩控制等。为了实现这些控制,需配备专用的控制电路。控制电路生成控制信号以驱动电机运转,同时接收电机反馈的信息,并基于此对控制信号进行更新。另外,借助PLC(Programmable Logic Controller:可编程逻辑控制器 ),可以同时对多个电机进行控制,从而实现更为复杂的电机控制。









