关键要点:
・控制引脚HINU、HINV、HINW分别对应高边IGBT的U相、V相、W相控制输入;LINU、LINV、LINW则分别对应低边IGBT的U相、V相、W相控制输入。
・需考虑误动作风险,为规避噪声干扰而插入RC滤波器时,应结合内部下拉电阻进行设计,确保满足控制引脚的输入规格要求。
・控制输入引脚HINU、HINV、HINW具备ROHM自有功能——在HVCC无通电状态下,可显示各机型固有的电阻值,可在安装到电路板上之后识别机型,从而检测出误装等异常情况。
・机型识别电阻的测量,应按照规定的测量方法进行。
本文将介绍“IGBT IPM:保护功能和工作时许”的最后一项“控制输入”。
- 短路电流保护功能(SCP)
- 控制电源欠压误动作防止功能(UVLO)
- 热关断保护功能(TSD) *仅限BM6337xS
- 模拟温度输出功能(VOT)
- 错误输出功能(FO)
- 控制输入(HINU、HINV、HINW、LINU、LINV、LINW)
IGBT IPM的控制输入(HINU、HINV、HINW、LINU、LINV、LINW)
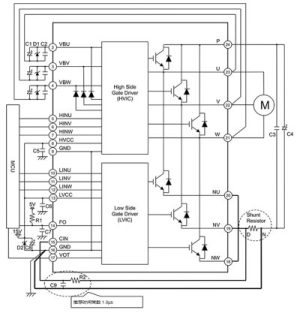
HINU、HINV、HINW分别为高边IGBT的U相、V相、W相控制输入端;LINU、LINV、LINW则分别为低边IGBT的U相、V相、W相控制输入端。它们通常接收来自MCU的控制信号。输入信号为高电平有效。下面是包括与MCU的连接示例在内的框图。红色方框圈起来的引脚为控制输入引脚。
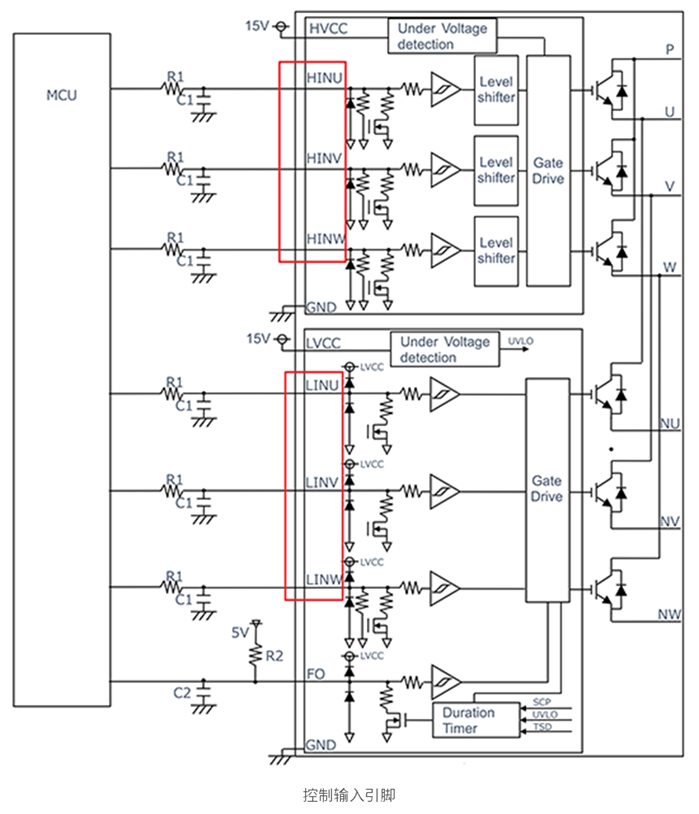
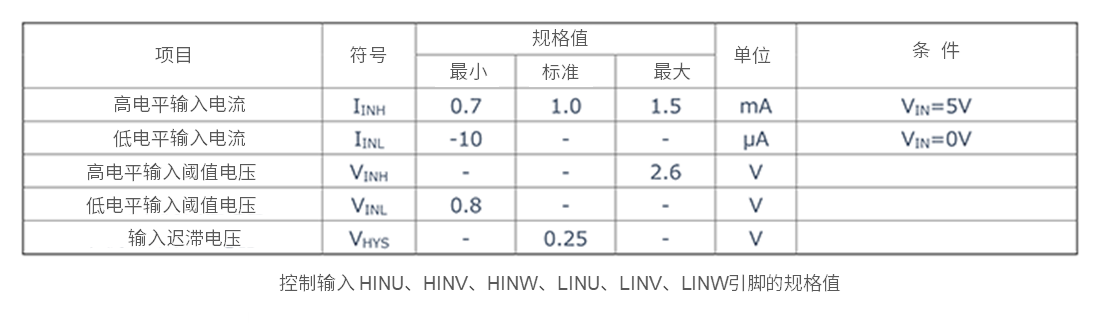
关于控制输入引脚需要注意的是,为防止误动作,布线要尽可能短。相应地,为避免噪声等的影响而插入RC滤波器(框图中的R1和C1)时,需要考虑到框图中所示的内部下拉电阻。下拉电阻的最小值为3.3kΩ,标准值为5.0kΩ,最大值为7.1kΩ。插入RC滤波器后,仍需确保满足控制引脚的输入规格要求。下表中是控制输入引脚的规格。
对于控制信号,存在上下桥臂死区时间、PWM输入频率、容许最小输入脉冲宽度等推荐工作条件,需遵循这些要求。详情请参阅产品规格书。
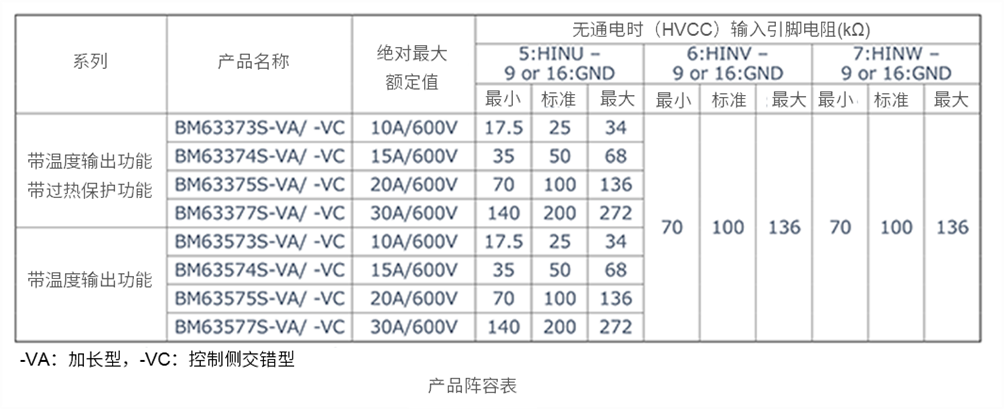
通过控制输入引脚实现产品识别功能
控制输入引脚HINU、HINV、HINW配备了ROHM自有功能——在HVCC无通电状态下,可显示因机型而异的电阻值。通常,模块的机型名称会印在封装背面,因此安装到电路板上之后很难确认机型。本系列产品通过测量这些引脚的电阻值,可在安装到电路板上之后进行机型识别,从而有效地检测出封装相同的其他公司产品或电流额定值不同的机型的误装情况。下面是各机型的电阻值以及控制输入引脚HINU、HINV、HINW的电阻和框图。
关于该功能,有以下确认事项及注意事项。
・当不对LVCC引脚和HVCC引脚施加电压时,HVCC的控制输入引脚HINU、HINV、HINW将呈现上表规格所规定的电阻值,而LVCC的控制输入引脚LINU、LINV、LINW则处于高阻抗状态。
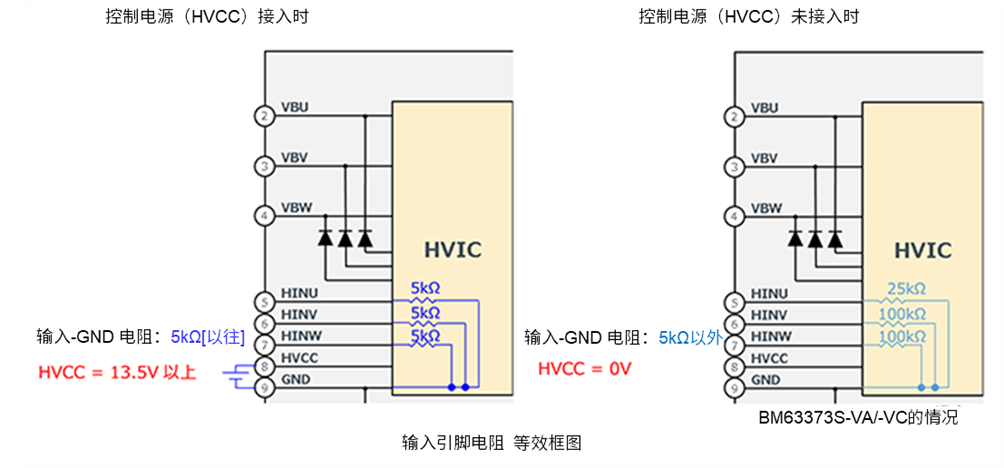
・控制输入引脚内部的下拉电阻在向LVCC和HVCC引脚施加推荐工作电压时生效,其阻值为3.3kΩ/5.0kΩ/7.1kΩ(最小值/标准值/最大值)(图中标注为标准值5kΩ)。
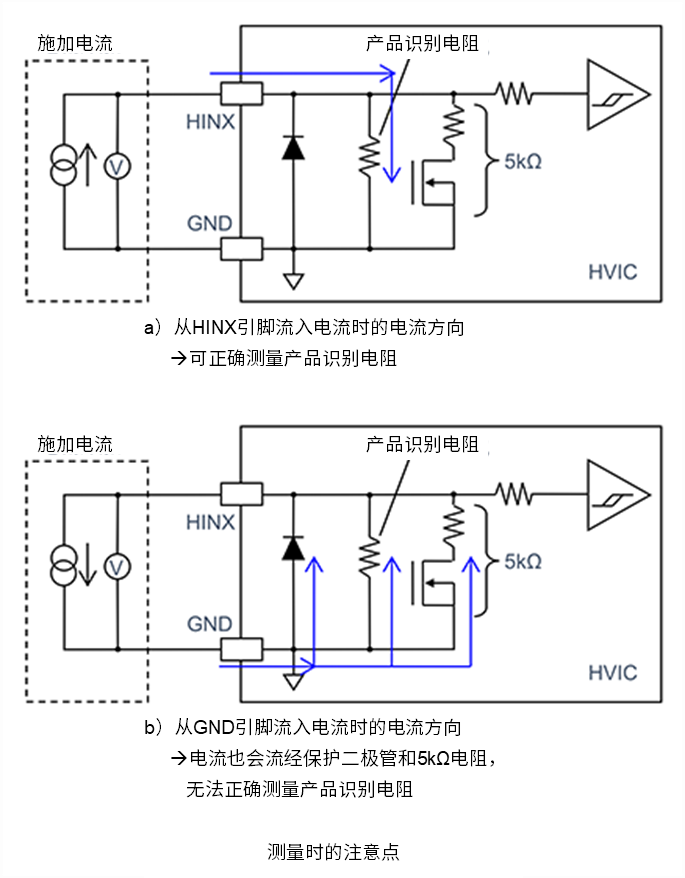
・在测量HIN-GND之间、HINV-GND之间、HINW-GND之间的电阻值时,请在电流从HINx引脚流向GND时进行测量,否则无法正确测得电阻值。
关于第三项的正确测量方法,请参考下图。