©UC Berkeley
加州大学伯克利分校研发了一款弹跳机器人,其垂直跳跃高度比大多数普通人类都高,并且还可以利用墙壁跳跃,弹离墙面落到另一个平台。SALTO这个名字再合适不过了,因为这个词表示翻越障碍地形的腾空运动。在拉丁语中,SALTO的意思也是“跳跃”。
参观了位于加利福尼亚州门洛帕克市的FEMA城市搜索和救援培训站之后,加州大学伯克利分校机器人博士生Duncan Haldane与其团队构建了这种专为搜索和救援设计的机器人。SALTO小巧而轻便,在地震、火灾等不幸事件毁坏建筑物后,该机器人将能够帮助人们克服在废墟砾中寻找生命迹象遇到的各种挑战和困难。
在机器人研发过程中,该团队公布了一项研究,其目的是评估利用具有机械效益适应的机器人串联弹性致动器增加机器人垂直跳跃敏捷性的可行性。研究工作表明,机械效益(MA)适应(其定义为脚部反作用力与致动器施加力之间的比值)可以增加串联弹性肌腱复合体传递的能量。SALTO采用了一种具有MA适应(SE+MA)的机器人串联弹性致动器,事实证明,该结构能够有效积蓄能量并提供更大能量,实现更高跳跃,从而提高垂直跳跃敏捷度。
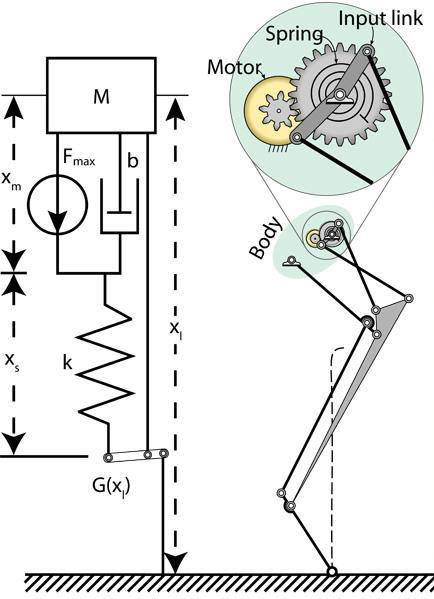
图1.SALTO 的能量调制;图中左侧为能量调制系统模型(SE+MA),右侧为机器人构造示意图。/ ©Haldane等,2016
设计灵感
Haldane研发SALTO模型的灵感来自动物世界。经过自然选择,动物们进化出了许多逃离捕食者的特殊能力。其中,引起Haldane注意的是婴猴,这种夜间灵长目动物能够在4秒钟内连续跳跃5次之多。跳跃之前,它们首先会下蹲。婴猴的最大垂直跳跃速度为2.2米/秒,而SALTO的速度为1.75米/秒,这打破了之前的机器人敏捷性纪录(1.12米/秒)。
婴猴的蹲伏行为有助于将能量储存在肌腱中,从而实现更好的跳跃效果。他们蹲下的时间越长,积蓄的能量就越多。将势能转化为动能的这种机制被称为能量调制。这是自然界中的一种适者生存现象,在生物力学文献中也被称为能量放大。
得益于针对动物和机器人系统设计的新跳跃度量和简单计算,SALTO展现了前所未有的敏捷性。Haldane及其团队将垂直跳跃敏捷性描述为“一个系统克服地球重力单次跳跃达到的高度乘以跳跃频率”。垂直运动,比如攀爬或扑动,可以用以下公式表示:
垂直跳跃敏捷性(米/秒)= h/(tstance + tapogee),
其中h=跳跃高度;tstance=跳跃开始后的总站立时间;tapogee=跳跃者离开地面直到达到跳跃最高点(垂直速度为零)的飞行时间。
由于考虑了重力,垂直跳跃敏捷性受限于动力重量比,只表示“动物能够改变多少能量状态以及变化速度”,不考虑方向的改变或转向行为。
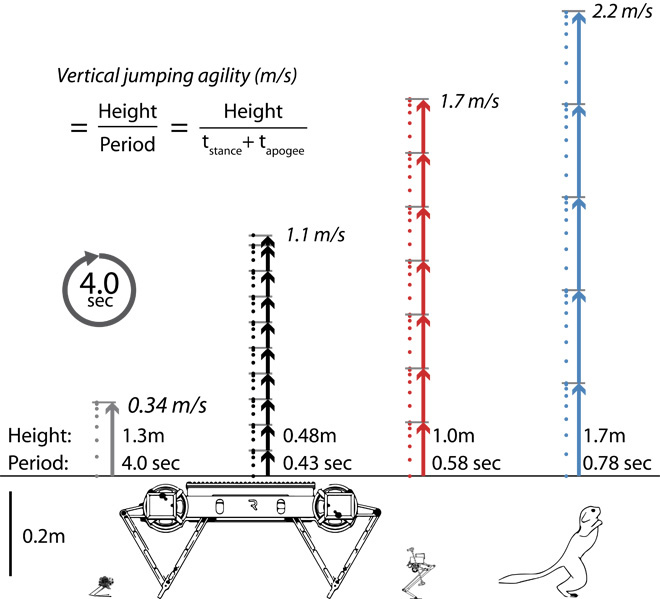
图2. 多种最敏捷系统在4秒钟内进行的一系列重复垂直跳跃(从左到右):平行弹性(EPFL跳跃者)、刚性跳跃(Minitaur机器人)、串联弹性能量调制(SALTO)和婴猴(Galagosenegalensis)。每个箭头表示一次跳跃。/ ©Haldane等,2016
机器人物理原型
Haldane利用驱动弹簧的电机将该机构集成到机器人中,通过腿部机构加载能量,以形成婴猴的那种蹲伏。通过这种方式,SALTO能够达到比单次跳跃更高的高度。
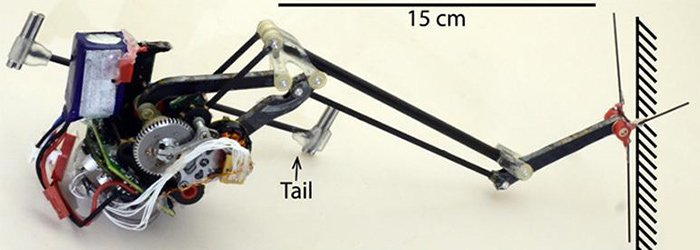
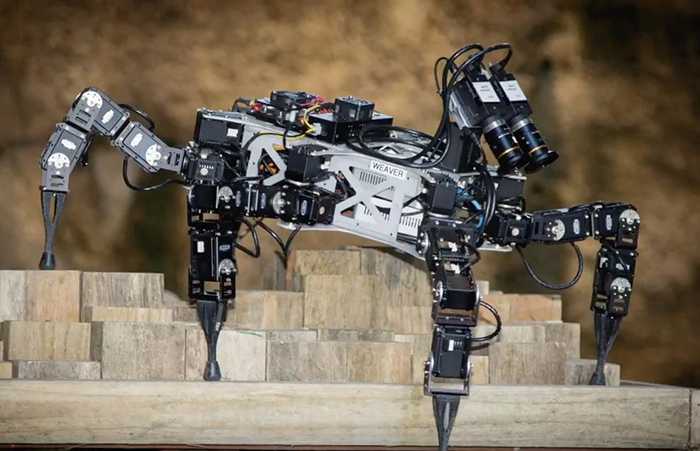
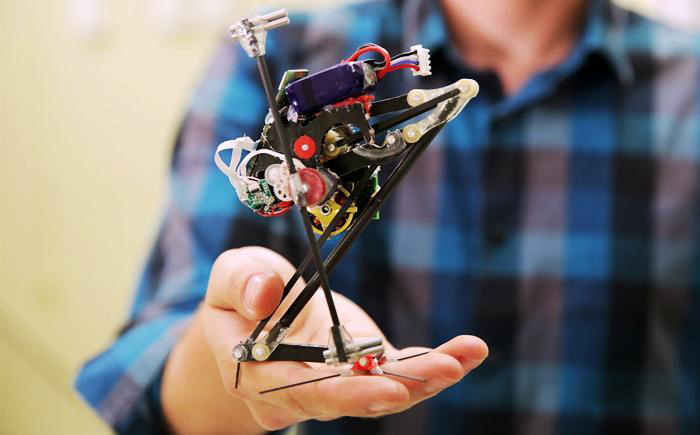
图3.组装好的婴猴机器人,Salto / ©Haldane等,2016
该机器人由ImageProc PCB、一个六轴惯性测量单元 (https://github.com/biomimetics/imageproc_pcb; 固件: https://github.com/dhaldane/roach), 两个位置传感器(ams AS5047P & AS5048B)、无刷电机(Scorpion S-1804-1650KV)、无刷直流电机驱动器(Advanced Motion Controls AZB10A4)组成,并由一块三芯11.1V 180 mAh锂聚合物电池供电。腿部链接由碳纤维复合材料制成,比如蜂窝芯碳纤维和FR4玻璃纤维。旋转关节通过2024精密铝合金底棒(McMaster-Carr 9062K24)与聚合物衬套(igusInc JFM-0304-05)连接,而衬套和轴通过模塑聚氨酯组件(Innovative Polymers IE-3075)与碳纤维结构集成在一起。
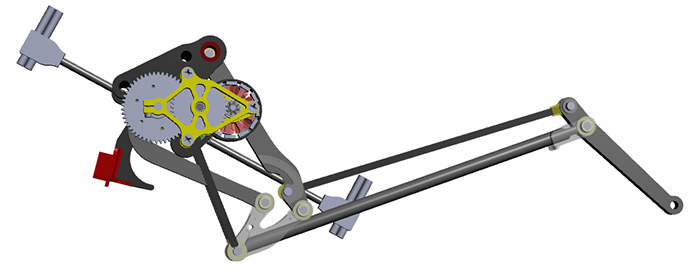
图4.无需电子控制装置的联合机构图 / ©Haldane等,2016
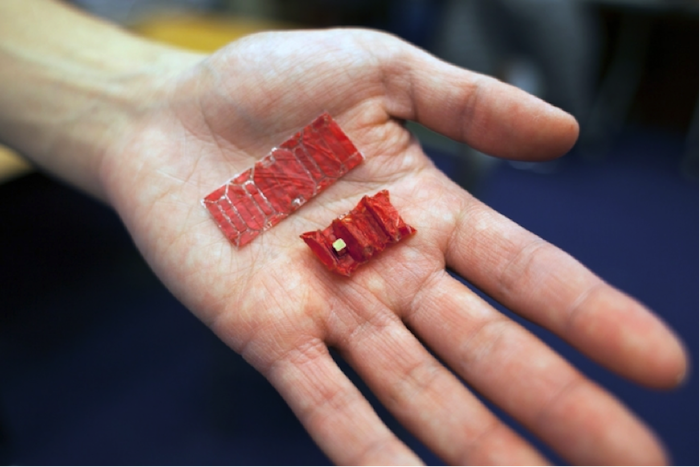
SALTO是单腿机器人,由一个进行能量调制的联动装置、一个串联弹性致动器以及一个进行姿态控制的惯性尾部组成。其重量仅为100克(3.5盎司),完全伸展时身高为26厘米(10.2英寸),垂直跳跃敏捷性能够达到婴猴的78%。虽然有些机器人单次跳跃高度高于SALTO,但是SALTO仍是垂直方向上最敏捷的机器人。
控制板以1000 Hz的频率测量机器人的身体角度、腿部位置和电机位置,并可以通过板载ZigBee用笔记本电脑控制。系统采用两路独立的线性反馈回路:“针对电机位置的比例控制器和针对身体角度的比例微分控制器”。身体角度通过一个单轴陀螺仪估算。用于弹离墙面的控制器是一个状态机。控制器启动时,将俯仰设定值设为机器人向前朝向墙面的角度。当俯仰角达到一定阈值时,机器人触发腿部伸展,形成跳跃。在空中,机器人将其腿部缩回,俯仰设定点设定为机器人接触墙面的角度。
测量/实验
该团队进行了多次实验,以确定机器人可以实现的最大高度增益和垂直跳跃敏捷性,比如运动时的墙面弹跳。对于垂直跳跃测试,他们将机器人放置在地板上,质心位于脚部正上方,然后用一个步进输入将跳跃连杆驱动到完全伸展。为了防止受控落地,这些试验没有激活机器人的尾部。
然后,他们进行了墙壁弹跳试验,机器人从地面跳到墙上,然后从墙面上弹离,整个过程中使用尾部进行定向。
实验墙面是一块0.25英寸厚的丙烯酸板,安装在挤压铝框架上。为了增加摩擦力,他们在地板上方0.88米处增加了一块直径为0.175米、0.25英寸厚的聚氨酯橡胶,作为机器人的垫脚之处。
这种来自生物学灵感的结构将会启发更多的人。此外,该团队希望继续探索新的行为,比如人类跑酷模型。跑酷也被称为自由飞跃,跑酷者利用自身运动跨越各种障碍物,比如墙壁、楼梯或建筑物之间的空隙。该团队希望能够形成一系列连续跳跃的扩展行为,以达到人们之前无法企及的运动极限。
Yulhane-Jerez Koh
Yulhane毕业于加州大学伯克利分校(UC Berkeley),是一名生物力学工程师,同时也是美国deviceplus公司的执行编辑。Yulhane的主要兴趣在于群体机器人、机器学习和神经科学领域。