在上一篇文章中以恒流驱动为例介绍了有刷直流电机的PWM驱动方法。本文将介绍有刷直流电机以BTL放大器输入形式的PWM驱动。
使用PWM输出方式驱动有刷直流电机:
BTL放大器输入形式驱动
同样,首先请看电路示例。这是一个有刷直流电机以BTL放大器的输入形式进行PWM驱动的电路示例。BTL放大器输入电路的工作原理在这里也有介绍,请一并参考。
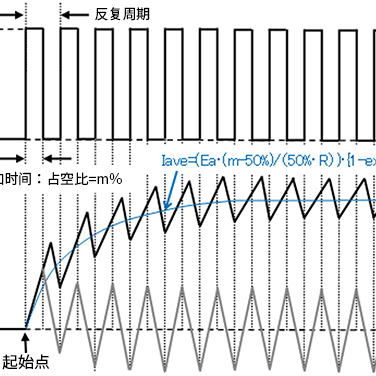
该驱动器在输入电路中使用与BTL放大器相同的差分放大器配置来控制H桥。它配有以Vref为基准偏置点的差分输入放大器,以及振幅为Vph-Vpl、且Vph和Vpl的中心值为Vref的三角波振荡器。通过由比较器将放大器的输出和三角波进行比较并转换为矩形波来生成PWM信号。两种矩形波输出中,一种为反相波形(参见波形图)。
当输入(VIN1-VIN2)为零时,放大器输出(AmpOut)的电压与Vref相同,两种输出均变为50%的On Duty驱动,流经电机的平均电流为零(参见右图)。
当输入(VIN1-VIN2)为正时,OUT1的On Duty大于50%,OUT2的On Duty小于50%,电流从OUT1流向OUT2。另外,当输入(VIN1-VIN2)为负时,OUT1的On Duty小于50%,OUT2的On Duty大于50%,电流从OUT2流向OUT1。
假设第一级放大器的电压增益为Gv,则通过VIN1-VIN2 =(Vph-Vref)/ Gv得出OUT1的On Duty为100%(H侧始终导通),OUT2的On Duty为0%(L侧始终导通)。
通过VIN1-VIN2 =(Vpl-Vref)/ Gv得出OUT1的On Duty为0%(L侧始终导通),OUT2的On Duty为100%(H侧始终导通)。
这种占空比控制有一些注意要点。这种结构也需要配备防止同时导通的电路,以确保高边晶体管和低边晶体管不会同时导通。如果有防止同时导通的电路,当占空比为0%或100%左右时,可能无法保持线性控制,因此需要确认其特性。另外还应注意,第一级放大器、三角波振荡器和比较器均具有偏移量变化,因此占空比相对于输入电压存在偏差。