本文将介绍“无刷电机位置传感器的作用及其布局”相关的内容,这也是在“无刷电机有传感器驱动和无传感器驱动的特征及区分使用”中“无刷电机有位置传感器的驱动”应注意的要点。
在无刷电机使用的位置传感器通常是磁传感器(霍尔元件,霍尔IC)。下图是表示无刷电机的电机结构和无刷电机的传感器布局的示意图。该电机是三相无刷电机(外转子型),其基本结构由装有磁体的转子和由电枢(绕组,铁芯)构成的定子组成。
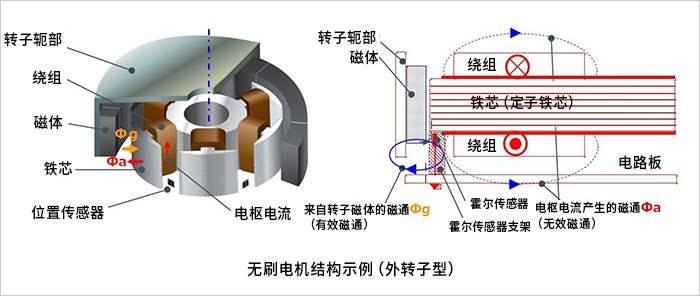
位置传感器(霍尔元件、霍尔IC)在准确检测电机的旋转位置方面发挥着重要作用。具体而言,需要将其安装在图中所示的位置,以准确检测旋转中的转子的磁通量Φg。然而,在电机中,转子的磁通会交链电枢,电流流过电枢而产生转矩。于是,由流过电枢的电流产生磁通Φa。
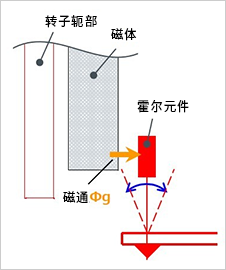
为了使位置传感器能够准确地检测出旋转中的转子的磁通量Φg,必须尽可能地避免受到该磁通Φa的干扰。此外,还涉及到用来消除位置传感器输出信号中包含的噪声的磁滞现象(霍尔IC和控制器的特性),无论如何,位置传感器的布局角度精度(右图)非常重要。
因此,如何最大程度地减少位置传感器的检测误差,是在无刷电机位置传感器的布局设计中要注意的关键要点。
![]()
- 霍尔元件/霍尔IC:
- 使用霍尔效应根据磁通密度输出电压的磁传感器。霍尔效应是一种当电流流过固体并且垂直于固体表面施加于磁场时,会在电流方向和磁场方向分别产生垂直方向(正交)的电压的现象。霍尔IC(也称为“霍尔传感器”)由运算放大器和数字转换器等组合而成。
- 外转子型:
- 内部线圈固定而外部磁轭旋转的结构。具有旋转轴的转动惯量大、对磁体的小型化要求少、线圈容易缠绕等特征。与其相对应的是内转子型,即外部磁轭固定而内部永磁体旋转的结构。
- 磁滞现象:
- 霍尔IC在用于判定磁通密度的阈值中,有工作磁通密度(ON)和恢复磁通密度(OFF),这两种阈值之间的差是磁滞。当阈值为1时,会变成一个钝感区,以防止由于阈值附近的磁通量微小变化(包括噪声等)而导致输出电压跃变。